



Simulación de contornas espaciais mediante realidade virtual
A realidade virtual foi a maior revolución deste fin de século debido á súa utilidade en diferentes ámbitos. Os últimos avances técnicos e informáticos están a permitir o seu uso no deseño de sistemas mecánicos industriais, sobre todo en sistemas de gran complexidade ou complexidade. Deste xeito, no propio centro de investigación CEIT están a crearse outros simuladores de aplicación industrial. Entre outras cousas, nos últimos anos desenvolvéronse ferramentas de realidade virtual paira a análise do comportamento do sistema de suspensión de coches e a formación no uso de maquinaria pesada paira a construción.
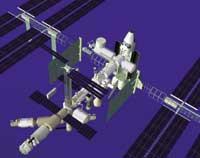
Esta ferramenta que simula contornas espaciais foi desenvolvida no CEIT a instancias da Axencia Europea do Espazo ESA/ESTEC. O seu obxectivo é a simulación interactiva de contornas espaciais complexos que permite predicir o comportamento de todos os obxectos móbiles que rodean misións espaciais, como espazos, robots, obxectos flotantes e astronautas. Desta forma preténdese mellorar o ciclo de deseño da estación espacial xa que permite visualizar gráficamente o comportamento do sistema en tempo real.
O programa permite crear diferentes escenarios. Estes escenarios modelizarán as contornas que a estación ISSA pode atopar na órbita da Terra, permitindo ao usuario do programa crear calquera escenario. Os elementos que ofrece o programa son:
Espazos: A estación espacial internacional Issa pode incorporarse ao escenario en tres fases da construción. Tamén se pode incluír a estación espacial MIR e o espazo Shuttle.
Planetas: O programa permite modelizar os movementos e a influencia da Terra, a Lúa e o Sol. Desta forma pódese ver a posición dos planetas en tempo real, noites, días, eclipses, etc. influencia.
Cámara Controlada Remota: Esta cámara pódese utilizar como obxecto volante e é una ferramenta perfecta paira obter vistas do escenario desde calquera posición. Ofrece todo tipo de imaxes, como imaxes que un astronauta vería cos seus propios ollos colocando una destas cámaras na súa cabeza. Existen dous modelos:
- Modelo Dinámico: A cámara considérase como un obxecto con inercia como calquera obxecto volante do espazo. Está dotado dun sistema de propulsión e os foguetes paira conseguir movemento impúlsanse até alcanzar a velocidade desexada.
- Modelo Cinemático Simplificado: A cámara non ten inercia polo que non se ten en conta ningún sistema de propulsión.
Doutra banda, tívose en conta a degradación que sufrirían as imaxes da cámara como consecuencia do ruído e a luz, co fin de ofrecer imaxes de gran realidade.
Obxectos Flotantes: Tamén é posible modelizar obxectos flotando no espazo. Estes obxectos seguen as leis da mecánica das órbitas e o joystick para mobilizalos permite aplicar pulsos de forza variable.
Sistemas Mecánicos: O programa de simulación COMPAMM desenvolvido no CEIT permite controlar o robot en forma de brazo ERA. Este robot, situado no módulo principal da estación espacial internacional ISSA, utilizarase paira reparacións exteriores de módulos, entre outros. É un sistema mecánico de dous partes con seis graos de liberdade paira o cumprimento das súas obrigacións. O robot ERA pode ser controlado tanto pola interfaz convencional como por unha caixa de control virtual. Esta última atópase na pantalla do programa e pódese utilizar mediante un punteiro paira mover os brazos do robot e agarrar os obxectos.
Humanos: As Actividades Extraespaciales ou EVA dos Astronautas hanse modelizado mediante a ferramenta de simulación DYNAMAN. Esta ferramenta desenvolveuse no CEIT para simular no espazo os movementos do corpo humano. Ten en conta, entre outras cousas, as barreiras de movemento dos traxes dos astronautas e está baseado nun sistema de 36 graos de liberdade paira representar todos os movementos humanos.
O Software do Simulador está baseado na Programación Orientada a Obxectos utilizando a linguaxe C++. O programa está dividido en varios módulos, tal e como se pode ver no seguinte esquema. O módulo principal é o módulo de control en tempo real que controla o resto de módulos. O movemento dos sistemas mecánicos nos escenarios contrólase de forma independente nos módulos de simulación.
Una das características máis importantes do programa é a visualización en 3 dimensións. O simulador ofrece dúas formas de mergullarse na Realidade Virtual: mediante lentes de imaxe estereográfica ou mediante casco HMD de realidade virtual. O primeiro utilízase paira simulacións sinxelas e paira a preparación do programa, xa que non xera o efecto de inmersión que ofrece o segundo.
O hardware do sistema está equipado con 4 CPU. Doutra banda, paira obter imaxes de alta calidade desenvolveuse un sistema que xera entre 30 e 60 imaxes por segundo, o que permite obter tecido de alta calidade, fontes de luz e reflexo. Paira a creación de imaxes utilizouse una estación gráfica de traballo SGI Onyx de altas prestacións co cartón gráfico Reality Engine 2.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







