



Simulació d'entorns espacials mitjançant realitat virtual
La realitat virtual ha estat la major revolució d'aquesta finalitat de segle degut a la seva utilitat en diferents àmbits. Els últims avanços tècnics i informàtics estan permetent el seu ús en el disseny de sistemes mecànics industrials, sobretot en sistemes de gran complexitat o complexitat. D'aquesta manera, en el propi centre de recerca CEIT s'estan creant altres simuladors d'aplicació industrial. Entre altres coses, en els últims anys s'han desenvolupat eines de realitat virtual per a l'anàlisi del comportament del sistema de suspensió de cotxes i la formació en l'ús de maquinària pesant per a la construcció.
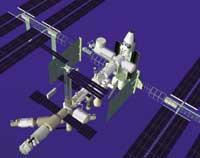
Aquesta eina que simula entorns espacials ha estat desenvolupada en el CEIT a instàncies de l'Agència Europea de l'Espai AQUESTA/ESTEC. El seu objectiu és la simulació interactiva d'entorns espacials complexos que permet predir el comportament de tots els objectes mòbils que envolten missions espacials, com a espais, robots, objectes flotants i astronautes. D'aquesta forma es pretén millorar el cicle de disseny de l'estació espacial ja que permet visualitzar gràficament el comportament del sistema en temps real.
El programa permet crear diferents escenaris. Aquests escenaris modelizarán els entorns que l'estació ISSA pot trobar en l'òrbita de la Terra, permetent a l'usuari del programa crear qualsevol escenari. Els elements que ofereix el programa són:
Espais: L'estació espacial internacional Issa pot incorporar-se a l'escenari en tres fases de la construcció. També es pot incloure l'estació espacial MIR i l'espai Shuttle.
Planetes: El programa permet modelizar els moviments i la influència de la Terra, la Lluna i el Sol. D'aquesta forma es pot veure la posició dels planetes en temps real, nits, dies, eclipsis, etc. influència.
Cambra Controlada Remota: Aquesta cambra es pot utilitzar com a objecte volant i és una eina perfecta per a obtenir vistes de l'escenari des de qualsevol posició. Ofereix tot tipus d'imatges, com a imatges que un astronauta veuria amb els seus propis ulls col·locant una d'aquestes cambres al seu cap. Existeixen dos models:
- Model Dinàmic: La cambra es considera com un objecte amb inèrcia com qualsevol objecte volant de l'espai. Està dotat d'un sistema de propulsió i els coets per a aconseguir moviment s'impulsen fins a aconseguir la velocitat desitjada.
- Model Cinemàtic Simplificat: La cambra no té inèrcia pel que no es té en compte cap sistema de propulsió.
D'altra banda, s'ha tingut en compte la degradació que sofririen les imatges de la cambra com a conseqüència del soroll i la llum, amb la finalitat d'oferir imatges de gran realitat.
Objectes Flotants: També és possible modelizar objectes surant en l'espai. Aquests objectes segueixen les lleis de la mecànica de les òrbites i el joystick per a mobilitzar-los permet aplicar polsos de força variable.
Sistemes Mecànics: El programa de simulació COMPAMM desenvolupat en el CEIT permet controlar el robot en forma de braç ERA. Aquest robot, situat en el mòdul principal de l'estació espacial internacional ISSA, s'utilitzarà per a reparacions exteriors de mòduls, entre altres. És un sistema mecànic de dues parts amb sis graus de llibertat per al compliment de les seves obligacions. El robot ERA pot ser controlat tant per la interfície convencional com per una caixa de control virtual. Aquesta última es troba en la pantalla del programa i es pot utilitzar mitjançant un punter per a moure els braços del robot i agarrar els objectes.
Humans: Les Activitats Extraespaciales o EVA dels Astronautes s'han modelizado mitjançant l'eina de simulació DYNAMAN. Aquesta eina s'ha desenvolupat en el CEIT per a simular en l'espai els moviments del cos humà. Té en compte, entre altres coses, les barreres de moviment dels vestits dels astronautes i està basat en un sistema de 36 graus de llibertat per a representar tots els moviments humans.
El Programari del Simulador està basat en la Programació Orientada a Objectes utilitzant el llenguatge C++. El programa està dividit en diversos mòduls, tal com es pot veure en el següent esquema. El mòdul principal és el mòdul de control en temps real que controla la resta de mòduls. El moviment dels sistemes mecànics en els escenaris es controla de manera independent en els mòduls de simulació.
Una de les característiques més importants del programa és la visualització en 3 dimensions. El simulador ofereix dues maneres de submergir-se en la Realitat Virtual: mitjançant ulleres d'imatge estereogràfica o mitjançant casc HMD de realitat virtual. El primer s'utilitza per a simulacions senzilles i per a la preparació del programa, ja que no genera l'efecte d'immersió que ofereix el segon.
El maquinari del sistema està equipat amb 4 CPU. D'altra banda, per a obtenir imatges d'alta qualitat s'ha desenvolupat un sistema que genera entre 30 i 60 imatges per segon, la qual cosa permet obtenir teixit d'alta qualitat, fonts de llum i reflex. Per a la creació d'imatges s'ha utilitzat una estació gràfica de treball SGI Onyx d'altes prestacions amb la targeta gràfica Reality Engine 2.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







