



Simulation of spatial environments through virtual reality
Virtual reality has been the greatest revolution of this century due to its usefulness in different areas. The latest technical and computer advances are allowing their use in the design of industrial mechanical systems, especially in systems of great complexity or complexity. In this way, other industrial application simulators are being created in the CEIT research centre itself. Among other things, in recent years, virtual reality tools have been developed for the analysis of the behavior of the car suspension system and training in the use of heavy machinery for construction.
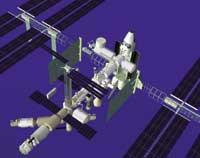
This tool that simulates spatial environments has been developed in the CEIT at the request of the European Agency of Space ESA/ESTEC. Its objective is the interactive simulation of complex spatial environments that allows predicting the behavior of all mobile objects surrounding space missions, such as spaces, robots, floating objects and astronauts. In this way it is intended to improve the design cycle of the space station as it allows to visualize graphically the behavior of the system in real time.
The program allows to create different scenarios. These scenarios will model the environments that the ISSA station can find in the Earth's orbit, allowing the program user to create any scenario. The elements offered by the program are:
Spaces: Spaces: The international space station Issa can be incorporated into the stage in three phases of construction. The MIR space station and the Shuttle space can also be included.
Planets: Planets: The program allows modelling the movements and influence of the Earth, the Moon and the Sun. In this way you can see the position of the planets in real time, nights, days, eclipses, etc. influence.
Remote Controlled Camera: This camera can be used as a steering object and is a perfect tool to get stage views from any position. It offers all kinds of images, like images that an astronaut would see with his own eyes placing one of these cameras on his head. There are two models:
- Dynamic Model: The camera is considered as an object with inertia as any flying object of space. It is equipped with a propulsion system and the rockets to get movement are driven to reach the desired speed.
- Simplified Cinematic Model: The camera has no inertia so no propulsion system is taken into account.
On the other hand, it has taken into account the degradation that images of the camera would suffer as a result of noise and light, in order to offer images of great reality.
Floating Objects: It is also possible to model objects floating in space. These objects follow the laws of the mechanics of the orbits and the joystick to mobilize them allows to apply pulses of variable force.
Mechanical Systems: The simulation program COMPAMM developed in the CEIT allows to control the robot in the form of ERA arm. This robot, located in the main module of the international space station ISSA, will be used for external repairs of modules, among others. It is a two-part mechanical system with six degrees of freedom to fulfill its obligations. The ERA robot can be controlled both by the conventional interface and by a virtual control box. The latter is located on the program screen and can be used by a pointer to move the robot arms and grab the objects.
Humans: Human: Astronauts' Extraspace or EVA Activities have been modelled using the DYNAMAN simulation tool. This tool has been developed in the CEIT to simulate in space the movements of the human body. It takes into account, among other things, the barriers of movement of astronauts' costumes and is based on a system of 36 degrees of freedom to represent all human movements.
The Simulator Software is based on Object-oriented Programming using the C++ language. The program is divided into several modules, as can be seen in the following scheme. The main module is the control module in real time that controls the rest of modules. The movement of mechanical systems in the scenarios is independently controlled in the simulation modules.
One of the most important features of the program is the 3-dimensional display. The simulator offers two ways to immerse yourself in Virtual Reality: using stereographic image glasses or HMD virtual reality helmet. The first one is used for simple simulations and for the preparation of the program, since it does not generate the immersion effect offered by the second one.
The system hardware is equipped with 4 CPUs. On the other hand, to obtain high quality images, a system has been developed that generates between 30 and 60 images per second, allowing to obtain high quality fabric, light sources and reflection. For the creation of images, a high-performance SGI Onyx graphic workstation has been used with the Reality Engine 2 graphics card.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







