



O robot a pé prepárase paira un duro paseo
Na Conferencia Internacional de Avances en Robótica celebrada o ano pasado en Tokyo, a peza de hardware máis sorprendente foi o robot a pé.
O robot haul coñécese como vehículo de suspensión adaptado (ASV, adaptive suspension vehicle) e foi construído coa axuda de 5 millóns de dólares ofrecida pola Axencia paira a Defensa dos Proxectos de Investigación Avanzados en EEUU.
ASV parece una mestura entre o camelo de tres cóncavos e a mantilla de monxas. Pero Kenneth Waldron, xefe do grupo que construíu os robots da Universidade Ohio State, asegura que é o ensaio máis sofisticado xamais realizado entre os vehículos a pé".
Este vehículo está deseñado paira circular por terreos arados. A vantaxe desta ferramenta con vehículos de rodas é a facilidade de pasar por encima dun obstáculo importante.
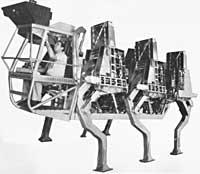
Considérase que o ASV é capaz de pasar sen evitar acequias de tres metros de anchura e obstáculos de dous metros de altura.
Ademais do corpo, é importante ter sensores de dispositivo. "Ter un sensor óptico non resultarache demasiado proveitoso si non coñeces a dirección que se está sinalando", afirma Waldon.
ASV ten una lonxitude de 5 metros, pesa 2,72 toneladas e é capaz de transportar 90 quilos.
Funciona cun motor adaptado de ciclomotores de 50 quilowatts e pode alcanzar una velocidade de 3 quilómetros por hora.
Un radar óptico situado na parte superior da cabina deste vehículo indica ao condutor o sentido da súa marcha.
Un láser de arsenuro de galio produce un raio infravermello que se reflicte nun sistema de espellos mecánicos e analiza a parte dianteira do vehículo. Estes raios infravermellos reflectidos son analizados mediante cinco computadores dunha soa función. Outros 10 computadores dunha soa función coordinan o movemento das pernas, lendo ordes procedentes do mando guía e enviando información ás pantallas da cabina.
Na parte superior da cabina hai dúas pantallas. A da esquerda indica as patas que hai no chan en todo momento. O da dereita é o estado exacto de todas as pernas.
Paira culminar e pór en marcha a construción de ASV, Waldron e o seu equipo tiveron que resolver una serie de problemas técnicos. Uno dos maiores problemas foi a subministración dunha gran cantidade de pezas que se desprazan de forma independente, cunha gran eficacia e un bo control.
"Tes que conseguir una gran eficiencia, tes que dotarche de capacidades", di Waldron.
Este ano, cando todos os módulos de software estean listos, ASV disporá de seis tipos de operacións paira cumprir os seus obxectivos en diferentes áreas. Paira isto é necesario que o paso concreto cando o operador ten cada perna baixo control, un mecanismo de circuíto pechado no que o computador do útil canaliza cada perna; un mecanismo totalmente automatizado, no que a sucesión das pernas non está predefinida, xa que depende da terra; un mecanismo cruzado pensado paira circular máis rápido por terreos ásperos, e un mecanismo de empuxe, que na súa totalidade é similar ao mecanismo cruzado, pero eliminando con maior velocidade una parte da información dos sensores.
A construción de ASV realizouse en maio. A semana anterior á realización movéronse as súas pernas individuais por primeira vez. Inicialmente as probas realizáronse mediante un sistema de sobremesa. Con todo, este ano será totalmente automatizado.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







