



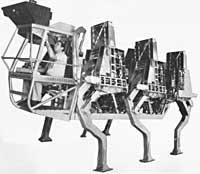
El robot a pie se prepara para un duro paseo
En la Conferencia Internacional de Avances en Robótica celebrada el año pasado en Tokyo, la pieza de hardware más sorprendente fue el robot a pie.
El robot haul se conoce como vehículo de suspensión adaptado (ASV, adaptive suspension vehicle) y fue construido con la ayuda de 5 millones de dólares ofrecida por la Agencia para la Defensa de los Proyectos de Investigación Avanzados en EEUU.
ASV parece una mezcla entre el camello de tres cóncavos y la mantilla de monjas. Pero Kenneth Waldron, jefe del grupo que construyó los robots de la Universidad Ohio State, asegura que es el ensayo más sofisticado jamás realizado entre los vehículos a pie".
Este vehículo está diseñado para circular por terrenos arados. La ventaja de esta herramienta con vehículos de ruedas es la facilidad de pasar por encima de un obstáculo importante.
Se considera que el ASV es capaz de pasar sin evitar acequias de tres metros de anchura y obstáculos de dos metros de altura.
Además del cuerpo, es importante tener sensores de dispositivo. "Tener un sensor óptico no te resultará demasiado provechoso si no conoces la dirección que se está señalando", afirma Waldon.
ASV tiene una longitud de 5 metros, pesa 2,72 toneladas y es capaz de transportar 90 kilos.
Funciona con un motor adaptado de ciclomotores de 50 kilovatios y puede alcanzar una velocidad de 3 kilómetros por hora.
Un radar óptico situado en la parte superior de la cabina de este vehículo indica al conductor el sentido de su marcha.
Un láser de arsenuro de galio produce un rayo infrarrojo que se refleja en un sistema de espejos mecánicos y analiza la parte delantera del vehículo. Estos rayos infrarrojos reflejados son analizados mediante cinco computadores de una sola función. Otros 10 computadores de una sola función coordinan el movimiento de las piernas, leyendo órdenes procedentes del mando guía y enviando información a las pantallas de la cabina.
En la parte superior de la cabina hay dos pantallas. La de la izquierda indica las patas que hay en el suelo en todo momento. El de la derecha es el estado exacto de todas las piernas.
Para culminar y poner en marcha la construcción de ASV, Waldron y su equipo tuvieron que resolver una serie de problemas técnicos. Uno de los mayores problemas fue el suministro de una gran cantidad de piezas que se desplazan de forma independiente, con una gran eficacia y un buen control.
"Tienes que conseguir una gran eficiencia, tienes que dotarte de capacidades", dice Waldron.
Este año, cuando todos los módulos de software estén listos, ASV dispondrá de seis tipos de operaciones para cumplir sus objetivos en diferentes áreas. Para esto es necesario que el paso concreto cuando el operador tiene cada pierna bajo control, un mecanismo de circuito cerrado en el que el computador del útil canaliza cada pierna; un mecanismo totalmente automatizado, en el que la sucesión de las piernas no está predefinida, ya que depende de la tierra; un mecanismo cruzado pensado para circular más rápido por terrenos ásperos, y un mecanismo de empuje, que en su totalidad es similar al mecanismo cruzado, pero eliminando con mayor velocidad una parte de la información de los sensores.
La construcción de ASV se realizó en mayo. La semana anterior a la realización se movieron sus piernas individuales por primera vez. Inicialmente las pruebas se realizaron mediante un sistema de sobremesa. Sin embargo, este año será totalmente automatizado.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







