



Intelixencia sintética: ciencia ou ficción?

Desde que temos conciencia da nosa mente quixemos saber a orixe e o funcionamento da intelixencia. Con todo, os científicos dos campos de estudo da intelixencia aínda non conseguiron una resposta unificada.
A falta dunha definición precisa, a intelixencia utilízase como una propiedade descritiva que explica as propiedades e capacidades dos individuos ou grupos. Relaciónanse coa intelixencia: pensamento, resolución de problemas, aprendizaxe e memoria, linguaxe, intuición e creatividade, conciencia, supervivencia, percepción e acción.
Si botamos unha ollada á lista, darémonos conta de que é difícil atrapar a intelixencia cunha sinxela definición. Por onde abordar entón a investigación da mente? Como construír un modelo que inclúa todas as características? Temos varias opcións, entre elas a Intelixencia Artificial.
A Intelixencia Artificial (IC) é a ciencia da construción de máquinas intelixentes que realizan accións concretas. Se estas accións fosen realizadas polo home, debería utilizar a súa intelixencia. Así o define AA Misnky, uno dos seus membros fundadores.
Intelixencia Incorporal

Descartes XVII. A AA parte do dualismo proposto no século XX: o corpo e a mente son diferentes sustancias, a física primeira e a incorpóreo (espiritual ou intelectual) segunda. Ao ser o corpo un mero mecanismo, a mente debe ser necesariamente o resultado de procesos internos e expresións internas abstractas que se producen no cerebro. En base a este principio, os investigadores da AA tentan construír modelos de computadores de procesos mentais.
Basicamente pódese entender a intelixencia como un programa de computadores: primeiro recóllense os datos de entrada (percepción), logo procésanse eses datos (cognición) e finalmente créanse os datos de saída (acción).
Os sistemas que se construíron seguindo este modelo, en definitiva, simulan os procesos nos que a intelixencia desenvolve innecesariamente o corpo: razoamentos lóxicos, resolución de problemas formais, xogos abstractos, etc.
Seguindo esta aproximación construíuse, por exemplo, a famosa máquina Deep Blue. En 1997 Deep Blue vence ao campión mundial Kasparov en xadrez, sendo un dos éxitos máis prestixiosos da AA.
O xadrez é un problema adecuado paira resolver por AA. Trátase dun xogo formal, no que as regras e posicións da táboa están perfectamente definidas e no que a infracción implica a perda do partido. Nunha partida, coñecendo o estado actual das pezas, dispomos de toda a información que necesitamos sobre o partido, xa que todos os movementos que se poden realizar (aínda que sexan moitos) están perfectamente definidos.

Por outra banda, o xogo ocorre nun mundo estático, é dicir, se os xogadores non fan movemento, non cambia nada no xogo.
A percepción do mundo da máquina Deep Blue limítase, por tanto, aos movementos que realiza o contrario, mentres que as accións que realiza dependen das normas de xadrez. O seu modelo de intelixencia é una enorme base de datos de estratexias de xadrez desenvolvidas polo home. Segundo este modelo de intelixencia, a computadora debe calcular o mellor movemento que pode realizar en cada momento. E a máquina Deep Blue ten a capacidade de calcular 200 millóns de movementos por segundo!
Así que tranquilo Kasparov. O éxito da máquina Deep Blue non se baseou no seu grao de intelixencia, senón na rapidez no cálculo segundo unhas normas concretas.
Pero cando abandonaron os mundos formais e abstractos e, utilizando o achegamento do clásico AA, quixeron desenvolver robots móbiles intelixentes integrados no mundo real, atopáronse cun gran inesperado problema: os robots construídos non eran capaces de adaptarse a contornas complexas e cambiantes. Por que?
No mundo real, a diferenza do xadrez, non hai movementos ou situacións definidas exactamente. É demasiado complexo paira poder expresarse cun modelo. Podemos facer como máximo una aproximación torpe e construír un modelo que só exprese una parte do mundo real.
Por outra banda, paira planificar as accións, o robot necesita información sobre a contorna, información detallada sobre o estado da contorna. Mentres recibe información e decide as accións segundo o seu modelo de intelixencia, a súa contorna cambia constantemente. Se se toma demasiado tempo paira pensar, a solución adoptada polo robot pode perder correspondencia co mundo real.
Conscientes das limitacións da visión descrita, varios investigadores comezaron a traballar novas vías a mediados do oitenta.
Intelixencia Integrada
Se o mundo real é aberto e cambiante, non o podemos expresar cun modelo estrito. A intelixencia é sobre todo a capacidade dun sistema paira adaptarse á súa contorna cambiante. A capacidade de adaptación implica, por unha banda, o uso dos coñecementos e regras que o sistema incorpora e, por outro, a capacidade de atopar novas solucións en situacións novas.

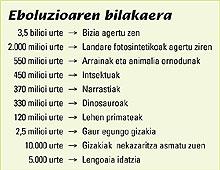
Este novo enfoque baséase na teoría da evolución. Se analizamos o camiño seguido pola evolución, primeiro atoparemos a capacidade de supervivencia e adaptación dos seres vivos, e moito máis tarde o coñecemento e o razoamento abstracto do ser humano. A evolución tardou máis en desenvolver este aspecto ou aspecto da intelixencia, demostrando que é o máis difícil de alcanzar.
Segundo esta nova aproximación, a comprensión e reprodución da intelixencia humana requiren, en primeiro lugar, a realización de numerosas prácticas con niveis de intelixencia máis baixos.
Esta nova aproximación da AA propón un modelo de abaixo a arriba, desde o conxunto básico de comportamentos necesarios paira a supervivencia (moverse, comer), cara a obxectivos cada vez máis complexos de forma incremental (explorar a contorna, regresar a casa polo camiño máis curto). Desde a interacción dos comportamentos até conseguir un comportamento global adecuado ou intelixente do sistema artificial.
A intelixencia, ou mellor devandito, o comportamento intelixente, xorde por tanto da interacción dun organismo, como o robot, coa súa contorna. Paira ilustrar mellor esta idea, é moi apropiado un sinxelo e sorprendente experimento con robots Didabots.
Robots limpadores Didabots

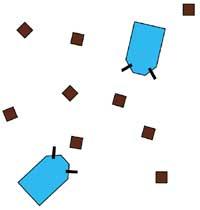
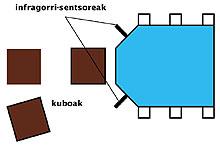
O escenario ou praza está formado por dúas Didabots e numerosos cubos de espuma sintética. Os robots están equipados con dous sensores de infravermello (que permiten a medida da aproximación dos obxectos) e só foron programados paira evitar obxectos.
Vexamos agora a secuencia de fotos que aparece na imaxe adxunta. No primeiro momento, os cubos están separados ao azar na praza. Co paso do tempo podemos observar que se están formando clusters ou conxuntos. Na última imaxe móstranse todos os cubos agrupados en dous grandes bloques. A pregunta exposta é En que están a traballar os robots? Como describiría o seu comportamento?
Entre os resultados obtidos atópanse: “están en labores de limpeza”, “están a tratar de agrupar os cubos”, “están a crear espazo libre”. Estas respostas son adecuadas desde o punto de vista do observador. Pero como deseñadores sabemos exactamente paira que se programaron os robots paira evitar obxectos!
Que pasou entón? Os robots Didabots reciben información sobre o medio a través dos seus sensores de infravermellos laterais. Desprázanse cara adiante ata que algún sensor detecta un cubo e viran cara ao outro lado. Iso é todo o que saben facer. O problema é que os sensores tanto de esquerda como de dereita non poden detectar o cubo que ten o robot fronte a fronte, e o robot continuará cara adiante empuxando o cubo. Pero o robot non se programou paira iso, empuxa o cubo porque non pode velo!
Até cando vai empuxar o cubo? Hai dúas opcións: si co movemento o cubo móvese cara á esquerda ou cara á dereita, os sensores do robot detectarano e o robot evitarao. Ademais, é posible que o robot se atope con outro cubo na súa parte esquerda ou dereita. No segundo caso, o robot tamén virará deixando os dous cubos xuntos. Neste caso, xa temos dous cubos xuntos, aos que se engadiron as posibilidades de unir outros. Os robots cambiaron a súa contorna e a nova contorna está a influír no comportamento dos robots. Reforza a súa tendencia á limpeza.
En experimentos repetidos obtivéronse resultados similares. Por tanto, poderiamos dicir que estamos en condicións de deseñar o robot limpador sen ter que programar explicitamente o proceso de lavado no robot. A tarefa de limpeza é algo que está na mente dos monitores e non na intelixencia do robot. No campo da robótica móbil, o comportamento deste experimento adoita denominarse “comportamento emerxente”, xa que emerxeu da interacción do robot coa súa contorna, sen ser especificamente programado paira iso.
Deste experimento podemos deducir que o comportamento do robot (intelixencia) xorde da interacción coa súa contorna. Non podemos deseñalo só como un mecanismo interno, nin entender os resultados só analizando os mecanismos internos. A capacidade do robot paira percibir a contorna e paira levar a cabo acciones nel influirá en gran medida no seu nivel intelectual.
Paira entender a intelixencia, por tanto, non basta con tentar comprender ou simular o funcionamento do cerebro (clásico AA). Pola contra, o organismo debe ser considerado na súa totalidade.
A contorna e o coñecemento non deben ser apresos, xa que o mundo real é aberto e cambiante, demasiado complexo paira poder expresarse mediante un modelo concreto. A nova aproximación dos últimos anos, a Intelixencia Integrada, aproveita a forza de interacción do organismo (robots) coa súa contorna paira desentrañar o camiño do que pode ser una verdadeira intelixencia. E parece que o camiño manda construír seres simples nun mundo real e complexo, en lugar de construír seres artificiais complexos en mundos simples (Deep Blue e xadrez).
Cerebro humano e computador

O clásico AA equipara o cerebro humano co computador. Seguindo este modelo, o ser humano sería una computadora de propósito xeral: nace cun determinado hardware (corpo) e é programada pola súa experiencia de comportamento e procesos de socialización. A intelixencia sería, por tanto, un programa que se está executando no cerebro (intelixencia = software).
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







