



Intel·ligència sintètica: ciència o ficció?

Des que tenim consciència de la nostra ment hem volgut saber l'origen i el funcionament de la intel·ligència. No obstant això, els científics dels camps d'estudi de la intel·ligència encara no han aconseguit una resposta unificada.
Mancant una definició precisa, la intel·ligència s'utilitza com una propietat descriptiva que explica les propietats i capacitats dels individus o grups. Es relacionen amb la intel·ligència: pensament, resolució de problemes, aprenentatge i memòria, llenguatge, intuïció i creativitat, consciència, supervivència, percepció i acció.
Si donem un cop d'ull a la llista, ens adonarem que és difícil atrapar la intel·ligència amb una senzilla definició. Per on abordar llavors la recerca de la ment? Com construir un model que inclogui totes les característiques? Tenim diverses opcions, entre elles la Intel·ligència Artificial.
La Intel·ligència Artificial (IC) és la ciència de la construcció de màquines intel·ligents que realitzen accions concretes. Si aquestes accions fossin realitzades per l'home, hauria d'utilitzar la seva intel·ligència. Així ho defineix AA Misnky, un dels seus membres fundadors.
Intel·ligència Incorporal

Descartes XVII. L'AA part del dualisme proposat en el segle XX: el cos i la ment són diferents substàncies, la física primera i la incorpóreo (espiritual o intel·lectual) segona. A l'ésser el cos un mer mecanisme, la ment ha de ser necessàriament el resultat de processos interns i expressions internes abstractes que es produeixen en el cervell. Sobre la base d'aquest principi, els investigadors de l'AA intenten construir models de computadors de processos mentals.
Bàsicament es pot entendre la intel·ligència com un programa de computadors: primer es recullen les dades d'entrada (percepció), després es processen aquestes dades (cognició) i finalment es creen les dades de sortida (acció).
Els sistemes que s'han construït seguint aquest model, en definitiva, simulen els processos en els quals la intel·ligència desenvolupa innecessàriament el cos: raonaments lògics, resolució de problemes formals, jocs abstractes, etc.
Seguint aquesta aproximació es va construir, per exemple, la famosa màquina Deep Blue. En 1997 Deep Blue venç al campió mundial Kasparov en escacs, sent un dels èxits més prestigiosos de l'AA.
Els escacs és un problema adequat per a resoldre per AA. Es tracta d'un joc formal, en el qual les regles i posicions de la taula estan perfectament definides i en el qual la infracció implica la pèrdua del partit. En una partida, coneixent l'estat actual de les peces, disposem de tota la informació que necessitem sobre el partit, ja que tots els moviments que es poden realitzar (encara que siguin molts) estan perfectament definits.

D'altra banda, el joc ocorre en un món estàtic, és a dir, si els jugadors no fan moviment, no canvia res en el joc.
La percepció del món de la màquina Deep Blue es limita, per tant, als moviments que realitza el contrari, mentre que les accions que realitza depenen de les normes d'escacs. El seu model d'intel·ligència és una enorme base de dades d'estratègies d'escacs desenvolupades per l'home. Segons aquest model d'intel·ligència, la computadora ha de calcular el millor moviment que pot realitzar a cada moment. I la màquina Deep Blue té la capacitat de calcular 200 milions de moviments per segon!
Així que tranquil Kasparov. L'èxit de la màquina Deep Blue no es va basar en el seu grau d'intel·ligència, sinó en la rapidesa en el càlcul segons unes normes concretes.
Però quan van abandonar els mons formals i abstractes i, utilitzant l'acostament del clàssic AA, van voler desenvolupar robots mòbils intel·ligents integrats en el món real, es van trobar amb un gran inesperat problema: els robots construïts no eren capaços d'adaptar-se a entorns complexos i canviants. Per què?
En el món real, a diferència dels escacs, no hi ha moviments o situacions definides exactament. És massa complex per a poder expressar-se amb un model. Podem fer com a màxim una aproximació maldestra i construir un model que només expressi una part del món real.
D'altra banda, per a planificar les accions, el robot necessita informació sobre l'entorn, informació detallada sobre l'estat de l'entorn. Mentre rep informació i decideix les accions segons el seu model d'intel·ligència, el seu entorn canvia constantment. Si es pren massa temps per a pensar, la solució adoptada pel robot pot perdre correspondència amb el món real.
Conscients de les limitacions de la visió descrita, diversos investigadors van començar a treballar noves vies a mitjan vuitanta.
Intel·ligència Integrada
Si el món real és obert i canviant, no el podem expressar amb un model estricte. La intel·ligència és sobretot la capacitat d'un sistema per a adaptar-se al seu entorn canviant. La capacitat d'adaptació implica, d'una banda, l'ús dels coneixements i regles que el sistema incorpora i, per un altre, la capacitat de trobar noves solucions en situacions noves.

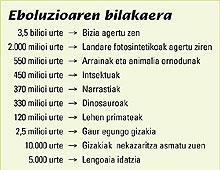
Aquest nou enfocament es basa en la teoria de l'evolució. Si analitzem el camí seguit per l'evolució, primer trobarem la capacitat de supervivència i adaptació dels éssers vius, i molt més tard el coneixement i el raonament abstracte de l'ésser humà. L'evolució ha trigat més a desenvolupar aquest aspecte o aspecte de la intel·ligència, demostrant que és el més difícil d'aconseguir.
Segons aquesta nova aproximació, la comprensió i reproducció de la intel·ligència humana requereixen, en primer lloc, la realització de nombroses pràctiques amb nivells d'intel·ligència més baixos.
Aquesta nova aproximació de l'AA proposa un model de baix a dalt, des del conjunt bàsic de comportaments necessaris per a la supervivència (moure's, menjar), cap a objectius cada vegada més complexos de manera incremental (explorar l'entorn, tornar a casa pel camí més curt). Des de la interacció dels comportaments fins a aconseguir un comportament global adequat o intel·ligent del sistema artificial.
La intel·ligència, o millor dit, el comportament intel·ligent, sorgeix per tant de la interacció d'un organisme, com el robot, amb el seu entorn. Per a il·lustrar millor aquesta idea, és molt apropiat un senzill i sorprenent experiment amb robots Didabots.
Robots netejadors Didabots

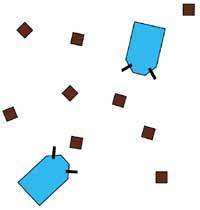
L'escenari o plaça està format per dues Didabots i nombroses galledes d'escuma sintètica. Els robots estan equipats amb dos sensors d'infraroig (que permeten la mesura de l'aproximació dels objectes) i només han estat programats per a evitar objectes.
Vegem ara la seqüència de fotos que apareix en la imatge adjunta. En el primer moment, les galledes estan separades a l'atzar en la plaça. Amb el pas del temps podem observar que s'estan formant clústers o conjunts. En l'última imatge es mostren totes les galledes agrupades en dos grans blocs. La pregunta plantejada és En què estan treballant els robots? Com descriuria el seu comportament?
Entre els resultats obtinguts es troben: “estan en labors de neteja”, “estan tractant d'agrupar els cubs”, “estan creant espai lliure”. Aquestes respostes són adequades des del punt de vista de l'observador. Però com a dissenyadors sabem exactament per a què s'han programat els robots per a evitar objectes!
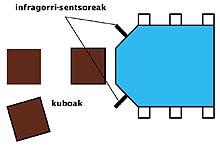
Què ha passat llavors? Els robots Didabots reben informació sobre el mitjà a través dels seus sensors d'infrarojos laterals. Es desplacen cap endavant fins que algun sensor detecta un cub i giren cap a l'altre costat. Això és tot el que saben fer. El problema és que els sensors tant d'esquerra com de dreta no poden detectar la galleda que té el robot cara a cara, i el robot continuarà cap endavant empenyent la galleda. Però el robot no s'ha programat per a això, empeny la galleda perquè no pot veure-ho!
Fins quan empenyerà la galleda? Hi ha dues opcions: si amb el moviment la galleda es mou cap a l'esquerra o cap a la dreta, els sensors del robot el detectaran i el robot l'evitarà. A més, és possible que el robot es trobi amb una altra galleda en la seva part esquerra o dreta. En el segon cas, el robot també girarà deixant les dues galledes junts. En aquest cas, ja tenim dues galledes juntes, als quals s'han afegit les possibilitats d'unir uns altres. Els robots han canviat el seu entorn i el nou entorn està influint en el comportament dels robots. Reforça la seva tendència a la neteja.
En experiments repetits s'han obtingut resultats similars. Per tant, podríem dir que estem en condicions de dissenyar el robot netejador sense haver de programar explícitament el procés de rentada en el robot. La tasca de neteja és alguna cosa que està en la ment dels monitors i no en la intel·ligència del robot. En el camp de la robòtica mòbil, el comportament d'aquest experiment sol denominar-se “comportament emergent”, ja que ha emergit de la interacció del robot amb el seu entorn, sense ser específicament programat per a això.
D'aquest experiment podem deduir que el comportament del robot (intel·ligència) sorgeix de la interacció amb el seu entorn. No podem dissenyar-ho només com un mecanisme intern, ni entendre els resultats només analitzant els mecanismes interns. La capacitat del robot per a percebre l'entorn i per a dur a terme accions en ell influirà en gran manera en el seu nivell intel·lectual.
Per a entendre la intel·ligència, per tant, no n'hi ha prou amb intentar comprendre o simular el funcionament del cervell (clàssic AA). Per contra, l'organisme ha de ser considerat íntegrament.
L'entorn i el coneixement no han de ser apresos, ja que el món real és obert i canviant, massa complex per a poder expressar-se mitjançant un model concret. La nova aproximació dels últims anys, la Intel·ligència Integrada, aprofita la força d'interacció de l'organisme (robots) amb el seu entorn per a desentranyar el camí del que pot ser una veritable intel·ligència. I sembla que el camí mana construir éssers simples en un món real i complex, en lloc de construir éssers artificials complexos en mons simples (Deep Blue i escacs).
Cervell humà i computador

El clàssic AA equipés el cervell humà amb el computador. Seguint aquest model, l'ésser humà seria una computadora de propòsit general: neix amb un determinat maquinari (cos) i és programada per la seva experiència de comportament i processos de socialització. La intel·ligència seria, per tant, un programa que s'està executant en el cervell (intel·ligència = programari).
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







