



Synthetic intelligence: science or fiction?

Since we have consciousness of our mind we have wanted to know the origin and functioning of intelligence. However, scientists in the fields of intelligence study have not yet achieved a unified response.
In the absence of precise definition, intelligence is used as a descriptive property that explains the properties and capabilities of individuals or groups. They relate to intelligence: thought, problem solving, learning and memory, language, intuition and creativity, consciousness, survival, perception and action.
If we take a look at the list, we will realize that it is difficult to catch intelligence with a simple definition. Why then approach the research of the mind? How to build a model that includes all the features? We have several options, including Artificial Intelligence.
Artificial Intelligence (AI) is the science of building intelligent machines that carry out concrete actions. If these actions were done by man, he should use his intelligence. This is defined by AA Misnky, one of its founding members.
Built-in Intelligence


Descartes XVII. The AA starts from the dualism proposed in the 20th century: body and mind are different substances, first physics and second incorporeal (spiritual or intellectual). As the body is a mere mechanism, the mind must necessarily be the result of internal processes and abstract internal expressions that occur in the brain. Based on this principle, AA researchers try to build computer models of mental processes.
Basically, intelligence can be understood as a computer program: first the input data (perception) is collected, then the data (cognition) is processed and finally the output data (action) is created.
The systems that have been built following this model, in short, simulate the processes in which intelligence unnecessarily develops the body: logical reasoning, resolution of formal problems, abstract games, etc.
Following this approach, for example, the famous Deep Blue machine was built. In 1997 Deep Blue defeated world champion Kasparov in chess, being one of the most prestigious successes of the AA.
Chess is a suitable problem to solve by AA. This is a formal game, in which the rules and positions of the table are perfectly defined and in which the violation involves the loss of the party. In a game, knowing the current state of the pieces, we have all the information we need about the party, since all the movements that can be made (although many) are perfectly defined.

On the other hand, the game occurs in a static world, that is, if the players do not make movement, nothing changes in the game.
The perception of the world of the Deep Blue machine is therefore limited to the movements performed by the opposite, while the actions performed depend on the rules of chess. His intelligence model is a huge database of chess strategies developed by man. According to this model of intelligence, the computer must calculate the best movement it can perform at any time. And the Deep Blue machine has the ability to calculate 200 million moves per second!
So quiet Kasparov. The success of the Deep Blue machine was not based on its degree of intelligence, but on the speed of calculation according to specific standards.
But when they abandoned the formal and abstract worlds and, using the approach of the classic AA, they wanted to develop intelligent mobile robots integrated into the real world, they encountered a big unexpected problem: built robots were not able to adapt to complex and changing environments. Why?
In the real world, unlike chess, there are no movements or situations defined exactly. It is too complex to express itself with a model. We can make at most a clumsy approach and build a model that only expresses a part of the real world.
Moreover, to plan actions, the robot needs information about the environment, detailed information about the state of the environment. While receiving information and deciding actions according to your intelligence model, your environment is constantly changing. If it takes too much time to think, the solution adopted by the robot may lose correspondence with the real world.
Aware of the limitations of the vision described, several researchers began to work on new paths in the mid-1980s.
Integrated Intelligence
If the real world is open and changing, we cannot express it with a strict model. Intelligence is above all the ability of a system to adapt to its changing environment. The ability to adapt implies, on the one hand, the use of the knowledge and rules that the system incorporates and, on the other, the ability to find new solutions in new situations.

This new approach is based on the theory of evolution. If we analyze the path followed by evolution, we will first find the capacity for survival and adaptation of living beings, and much later the knowledge and abstract reasoning of the human being. Evolution has taken longer to develop this aspect or aspect of intelligence, demonstrating that it is the most difficult to achieve.
According to this new approach, the understanding and reproduction of human intelligence requires, first of all, the realization of numerous practices with lower levels of intelligence.
This new approach to OA proposes a bottom-up model, from the basic set of behaviors needed for survival (moving, eating), to increasingly complex goals in an incremental way (exploring the environment, returning home on the shortest path). From interaction of behaviors to achieving an adequate or intelligent global behavior of the artificial system.
Intelligence, or rather intelligent behavior, therefore arises from the interaction of an organism, like the robot, with its environment. To better illustrate this idea, a simple and surprising experiment with Didabots robots is very appropriate.
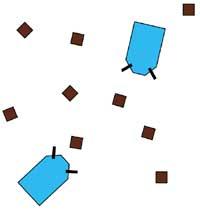
Didabots cleaning robots

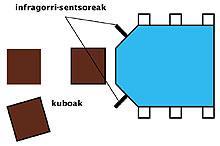
The stage or square consists of two Didabots and numerous synthetic foam cubes. The robots are equipped with two infrared sensors (which allow the measurement of the approximation of objects) and have only been programmed to avoid objects.
Let's now see the sequence of photos that appears in the attached image. At first, the cubes are randomly separated in the square. Over time we can observe that clusters or sets are forming. The last image shows all the cubes grouped into two large blocks. The question posed is what are robots working on? How would you describe your behavior?
Among the results obtained are: “They’re cleaning up,” “they’re trying to group the cubes,” “they’re creating free space.” These responses are appropriate from the observer's point of view. But as designers we know exactly what robots have been programmed for to avoid objects!
What happened then? Didabots robots receive information about the medium through their side infrared sensors. They move forward until a sensor detects a cube and turn to the other side. That's all they know how to do. The problem is that both left and right sensors cannot detect the cube that the robot has in front of each other, and the robot will continue forward pushing the cube. But the robot hasn't been programmed for that, push the cube because it can't see it!
How long will you push the cube? There are two options: if with movement the cube moves left or right, the sensors of the robot will detect it and the robot will avoid it. In addition, the robot may encounter another cube on its left or right side. In the second case, the robot will also rotate leaving the two cubes together. In this case, we already have two cubes together, to which the possibilities of joining others have been added. Robots have changed their environment and the new environment is influencing the behavior of robots. Reinforces your tendency to cleanliness.
Similar results have been obtained in repeated experiments. Therefore, we could say that we are able to design the cleaning robot without having to explicitly program the washing process in the robot. The cleaning task is something that is in the minds of monitors and not in the intelligence of the robot. In the field of mobile robotics, the behavior of this experiment is often called “emergent behavior”, since it has emerged from the interaction of the robot with its environment, without being specifically programmed for it.
From this experiment we can deduce that the behavior of the robot (intelligence) arises from the interaction with its environment. We cannot only design it as an internal mechanism, nor understand the results only by analyzing the internal mechanisms. The ability of the robot to perceive the environment and to carry out actions in it will greatly influence its intellectual level.
To understand intelligence, therefore, it is not enough to try to understand or simulate the functioning of the brain (classic AA). On the contrary, the organism must be considered in its entirety.
The environment and knowledge should not be learned, since the real world is open and changing, too complex to express itself through a concrete model. The new approach of recent years, Integrated Intelligence, takes advantage of the interaction force of the organism (robots) with its environment to unravel the path of what can be a true intelligence. And it seems that the road commands building simple beings in a real and complex world, rather than building complex artificial beings on simple worlds (Deep Blue and chess).
Human brain and computer

The classic AA equates the human brain with the computer. Following this model, the human being would be a computer of general purpose: born with a certain hardware (body) and is programmed by his experience of behavior and processes of socialization. Intelligence would therefore be a program that is running in the brain (intelligence = software).
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







