Robotak portaera adimentsua izango badu, kontrol-sistemak zenbait ezaugarri izan behar ditu. Alde batetik, denbora errealean erreakzionatu behar du. Erreflexuak izan behar ditu, bestela esanda; ingurunean gertatzen diren ustekabeko aldaketen aurrean azkar eta egoki erreakzionatzeko ahalmena. Bestalde, goi-mailako planifikazio-ahalmena izan behar du; hau da, hainbat aukera hausnartu eta erabakiak hartzeko ahalmena, eta aurrez egindako akatsetatik ikastekoa.
Pentsatzeko ahalmena eta berehalako erreakzioa uztartzea ez da, ordea, batere erraza. Pentsatzeak denbora eskatzen du, baina erreakzioek berehalakoak izan behar dute. Nolabait, erreakzioaren eta planifikazioaren arteko konbinazio egokia topatu behar dugu gure kontrol-sisteman. Robota mundu errealean diharduen sistema izaki, haren kontrol-sistema lotua dago robot-ingurune elkarrekintza egokia sortu eta mantenduko duten prozesuekin.
Robot mugikor oro ataza jakin bat burutzeko diseinatzen da. Ez dago orotarako robotik, robot unibertsalik. Marisorginen kasuan, lan honetarako aukeratu dugun nabigazio-ataza honako hau da: robotak laborategitik irten eta liburutegira joan beharko du (handik liburu batzuk jasotzeko, adibidez). Behin hara iritsita, buelta eman eta Otzetaren bulegotik pasaraziko dugu (Otzetak eskatutako liburuak jaso ditzan). Azkenik, laborategirako bidea egin beharko du berriro.
Robota
Ataza hori egingo duen robota diseinatzeko, lehenik eta behin kontuan hartu behar da gure mundu-ikuskera eta robot batek izan lezakeena zeharo ezberdinak direla, haren sentsore eta eragileak gureekiko zeharo ezberdinak direlako.
Izakiok ikusmenaren, ukimenaren, usaimenaren eta entzumenaren bidez hautematen ditugu inguruneko objektu eta gertaerak, eta objektu horiekin daukagun harremana gure ekintzarako gaitasunak (heldu, mugitu, bota) baldintzatzen du.
Baina gaur egungo teknologia oraindik urrun dago izaki bizidunok dauzkagun sentsoreen sofistikazio-maila lortzetik. Horregatik, garrantzitsua da robotaren mundu-ikuspegia ulertzea; hau da, robotak inguruneari buruzko informazioa jasotzeko edota ingurune horretan ekintzak gauzatzeko dauzkan mugez jabetzea. Izan ere, robot baten adimen-maila ingurunea hauteman eta batak besteari eragiteko gaitasunaren araberakoa ere bada.
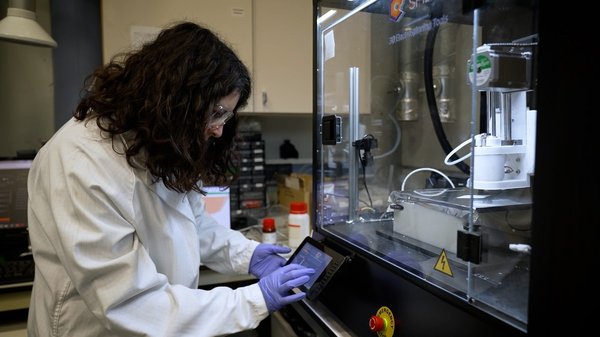
Gure robota, Marisorgin, RWI enpresak ekoitzitako B21 robot holonomoa da, eta sentsore eta eragile ugari ditu.
Oinarrizko nabigazioa
Sentsore horiei esker, Marisorgin robotak badauka oinarrizko erreflexu-sistema bat. Infragorriei esker, objektu estatiko eta dinamikoekiko talkak saihesteko gai da, eta, sonarren bidez, ezker eta eskuinaldean daukan espazio librea kalkulatu eta ibilera zentra dezake. Erreflexu-sistema hori portaera batzuen arabera gorpuzten da, robotaren oinarrizko ekintza-patroi batzuen arabera, alegia. Aipatutako biak, esaterako, ‘objektuak saihestu’ eta ‘zuzendu’ portaerei dagozkie, hurrenez hurren.
Horiez gain, beste bi portaera ditu Marisorginek: ‘helburuari jarraitu’ eta ‘gelditu’. Lehenengoak, iparrorratzaren orientazio jakin bat emanda, robota norabide horretarantz bultzatzen du. ‘Gelditu’, berriz, robotak objekturen batekin talka egiten badu aktibatzen da eta sistema osoaren funtzionamendua eteten du.

Portaera bakoitzak, beraz, bere helburua dauka, eta helburu hori erdiesteko zer ekintza egin behar dituen erabakitzen du, hau da, robotak exekutatu beharreko aginduak. Agindu horiek motor-sistemara bidaliko direnez, errotazio- eta translazio-abiaduren magnitudearen (zenbat) eta zeinuaren (aurrera ala atzera, ezkerrera ala eskuinera) bidez adierazten dira.
Lokalizazio-sistema
Oinarrizko nabigazioarekin, robotak modu seguruan esploratzen du bere ingurunea. Baina noraezean dabil, orientazio jakin batean nabigatzeko baino ez da gai. Marisorginen ibilerak helburu bat izan dezan, inguruneko zenbait marka identifikatzeko gaitasuna erantsi behar zaio, kokalekuak identifikatzeko modua izan dezan. Garrantzitsua da, baina, ataza robotaren ikuspegitik aztertzea. Marka edo ezaugarri orokorrak (sentsoreen bitartez hauteman ditzakeenak) eta esanguratsuak (ibileran lagungarri izango zaizkionak) aurkitu behar ditugu. Guk ‘pasillo-gela’ eta ‘bidegurutze’ markak aukeratu ditugu.
‘Pasillo-gela’ portaeraren helburua robotaren unean uneko kokalekuaren berri ematea da, eta sonarrez baliatzen da horretarako. Kontuan izan robotaren ingurunea gela eta pasilloz osatua dagoela eta, sonarrez bidez, objektuekiko distantzia kalkulatzen duela robotak. Ondorioz, paretak urrunago edo gertuago daudela hautemanez, robotak non dagoen jakin dezake (pasilloan edo gela batean).
Bidegurutze-marka, berriz, larrialdi-irteerak baliatuz diseinatu dugu. Izan ere, eraikuntza publiko guztiek larrialdi-irteeretako seinaleak izan behar dituzte bidegurutzeetan, eta ezaugarri hori baliagarria da gure helburuetarako: robotak bidegurutzeetako seinaleak identifikatuko balitu, erraza litzateke guretzat helburura iristeko zer norabide hartu behar duen adieraztea.
Larrialdi-irteerako seinaleak identifikatzeko, Marisorginek inguruneari buruzko irudiak jasotzen ditu lehendabizi kameraren bidez. Ondoren, irudi horiek larrialdi-irteerako seinaleak identifikatzeko prestatu den neurona-sareak tratatzen ditu.
Nabigazio Sistema Orokorra
Oinarrizko nabigazioa eta lokalizazio-sistema batuta, orain arte azaldutako portaera guztiak konbinatzen dituen goi-mailako portaera bat lortzen dugu. Nabigazio Sistema Orokorraren helburua, objektuekiko talkak saihesteaz gain, robota gela eta pasilloetan barrena helmuga-punturantz zuzentzea da, bidegurutze bakoitzean hartu behar duen norabidea zein den adierazita.
Proposatutako nabigazio-sistemaren egokitasuna neurtzeko, hainbat esperimentu egin dira Marisorginekin Donostiako Informatika Fakultateko 3. solairuan. Eta helbururik behinena lortu dugulakoan gaude; izan ere, robota bere inguruneko ezaugarriez baliatuz nabigatzeko gai da.
Lanaren ekarpenik garrantzitsuena robotak bere inguruneaz jabetzeko eta ingurune horren ezaugarriez baliatzeko egiten duen ahalegina dela uste dugu. Izan ere, nabigaziorako teknika askoren funtsa ingurunearen mapa eraiki eta mapa robotari ematean datza.
Hurbilpen horrek arazo larri bat dauka, ordea: robota ez da gai bere ingurunean gertatzen diren ustekabeko aldaketen aurrean behar bezala erantzuteko (aulki bat edota jendea bere ibilbidea oztopatzen). Edonola ere, azaldutako sistemak aurrera begira ere fruituak eman ditzakeelakoan, nabigazio-sistema orokortu eta beste ataza eta robot batzuetara egokitu nahi genuke. Horretan dihardugu.
Marisorgin robot mugikorra
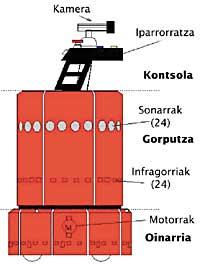
Sentsoreak
Sonarrak: Inguruneko objektuetarako distantzia kalkulatzen dute. Sonarren irakurketek fidagarritasuna galtzen dute hiru metrotik gorako eta metro batetik beherako distantzietan.
Infragorriak: Argi-intentsitatearen arabera objektuen gertutasuna neurtzen dute. 50 cm-ra edo gutxiagora dauden objektuak bakarrik detekta ditzakete.
Talka-sentsoreak: Izenak adierazten duen moduan, talkak detektatzen dituzte.
Iparrorratza: Unean uneko orientazioaren berri ematen du.
Kamera: Sentsoreen artean konplexuena da, dudarik gabe, baina baita informazio gehien eskain lezakeena ere.
Eragileak
Motorrak: nabigaziorako beharrezkoak diren mugimenduak egiten dituzte: bi translaziorako eta bat errotaziorako.


Lazkano, Elena
Sierra, Basilio
Astigarraga, Aitzol