



Robot Marisorgin

Para que o robot teña un comportamento intelixente, o sistema de control debe ter varias características. Por unha banda, debe reaccionar en tempo real. Debe ter reflexos, noutras palabras, capacidade de reacción rápida e adecuada ante cambios imprevistos na contorna. Ademais, debe contar cunha alta capacidade de planificación, é dicir, capacidade de reflexión e toma de decisións sobre diferentes alternativas e de aprender de erros previos.
Combinar a capacidade de pensar coa reacción inmediata non é nada fácil. Pensar require tempo, pero as reaccións deben ser inmediatas. Dalgunha maneira, debemos atopar no noso sistema de control una combinación adecuada entre a reacción e a planificación. Ao ser o robot un sistema que opera no mundo real, o seu sistema de control está asociado a procesos que xeren e manteñan una interacción robótica adecuada.
Todo robot móbil deséñase paira realizar una tarefa concreta. Non hai robot universal paira todo. No caso de Marisorgin, a tarefa de navegación que eliximos paira este traballo é a seguinte: o robot terá que saír do laboratorio e ir á biblioteca (de alí recoller algúns libros, por exemplo). Una vez alí, damos a volta e pasarémola pola oficina de Otzeta (para que Otzeta recolla os libros solicitados). Finalmente, deberá realizar novamente o camiño ao laboratorio.
Robot
Paira deseñar o robot que vai realizar esta tarefa, en primeiro lugar hai que ter en conta que a nosa visión do mundo e a que pode ter un robot son totalmente diferentes, xa que os seus sensores e axentes son totalmente diferentes aos nosos.
Estes seres percibimos os obxectos e acontecementos da contorna a través da visión, o tacto, o olfacto e o oído, e a nosa relación con estes obxectos está condicionada pola nosa capacidade de acción (madurar, mover, tirar).
Pero a tecnoloxía actual está aínda lonxe de alcanzar o grao de sofisticación dos sensores que temos os seres vivos. Por iso, é importante comprender a visión mundial do robot, é dicir, as limitacións que ten o robot paira recibir información sobre a súa contorna ou paira levar a cabo acciones nel. De feito, o grao de intelixencia dun robot depende tamén da capacidade de percibir a contorna e de interactuar entre si.
O noso robot, Marisorgin, é un robot holónomo B21 producido pola empresa RWI, con multitude de sensores e actuadores.
Navegación básica
Estes sensores permiten ao robot Marisorgin dispor dun sistema de reflexos básico. Grazas aos infravermellos, é capaz de evitar choques con obxectos estáticos e dinámicos e, a través de soárelos, pode calcular e centrar a marcha no seu espazo libre esquerdo e dereito. Este sistema de reflexos constrúese en base a uns comportamentos, uns patróns básicos de acción do robot. Ambas se refiren, por exemplo, a comportamentos “evitar obxectos” e “corrixir” respectivamente.Ademais, Marisorgin ten outros dous comportamentos: ‘seguir o obxectivo’ e ‘parar’. O primeiro, cunha determinada orientación do compás, impulsa ao robot cara a esa dirección. Pola súa banda, ‘parar’ actívase si o robot choca contra un obxecto e interrompe o funcionamento de todo o sistema.

Cada comportamento, por tanto, ten o seu obxectivo e decide as accións que debe realizar o robot paira lograr ese obxectivo, é dicir, as instrucións que debe executar. Dado que estas ordes enviaranse ao sistema motor, exprésanse mediante a magnitude (cantas) e o signo (adiante ou cara atrás, esquerda ou dereita) das velocidades de rotación e translación.
Sistema de localización
Coa navegación básica, o robot explora a súa contorna de forma segura. Pero está á deriva, só é capaz de navegar con certa orientación. Para que a marcha de Marisorgin teña un obxectivo, débese engadir a capacidade de identificar algunhas marcas da contorna que permitan identificar os emprazamentos. Pero é importante analizar a tarefa desde o punto de vista do robot. Buscaremos marcas ou características xerais (que pode detectar mediante sensores) e significativas (que lle axudarán no percorrido). Nós eliximos márcalas ‘corredor-gela’ e ‘bifurcación’.
O comportamento ‘Salga de Corredores’ ten como obxectivo dar a coñecer a localización actual do robot, paira o que utiliza soares. Ten en conta que a contorna do robot está formado por habitacións e corredores e, mediante soares, calcula a distancia aos obxectos. En consecuencia, detectando que as paredes están máis ou menos afastadas, o robot pode saber onde está (no corredor ou nunha habitación).
A marca de cruzamento deseñouse con saídas de emerxencia. E é que todos os edificios públicos deben dispor de sinais de saída de emerxencia nas cruces, característica que nos serve paira os nosos fins: se o robot identificase os sinais das cruces, sería fácil paira nós indicar a dirección que debe seguir paira chegar ao seu destino.
Paira identificar os sinais de saída de emerxencia, Marisorgin toma primeiro imaxes da contorna a través da cámara. A continuación, estas imaxes son tratadas pola rede neuronal que se preparou paira identificar os sinais de saída de emerxencia.
Sistema Xeral de Navegación
Unindo a navegación básica e o sistema de localización conseguimos un comportamento de alto nivel que combina todos os comportamentos descritos até agora. O obxectivo do Sistema Xeral de Navegación, ademais de evitar colisións con obxectos, é dirixir o robot cara ao punto de chegada a través das habitacións e corredores, indicando a dirección que debe tomar en cada cruzamento.
Paira medir a idoneidade do sistema de navegación proposto realizáronse varios experimentos con Marisorgin na 3ª planta da Facultade de Informática de San Sebastián. E esperamos que alcancemos o obxectivo principal, xa que o robot é capaz de navegar coas características da súa contorna.
Consideramos que a achega máis importante do traballo é o esforzo que realiza o robot paira apropiarse da súa contorna e aproveitar as súas características. De feito, moitas técnicas de navegación baséanse na construción do mapa da contorna e na entrega do mapa ao robot.
O problema desta aproximación é que o robot non é capaz de responder adecuadamente ante cambios imprevistos que se producen na súa contorna (una cadeira ou a xente dificulta o seu percorrido). En calquera caso, porque o sistema exposto pode dar os seus froitos de face ao futuro, gustaríanos xeneralizar o sistema de navegación e adaptalo a outras tarefas e robots. Niso estamos.
Robot móbil Marisorgin
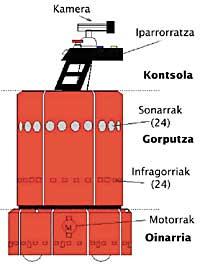
Sensores
Soares: Calculan a distancia aos obxectos da contorna. As lecturas de Soar perden fiabilidade en distancias superiores a tres metros e inferiores a un metro. Infravermellos: Miden a proximidade dos obxectos en función da intensidade lumínica. Só poden detectar obxectos a 50 cm ou menos. Sensores de impacto: Como o seu nome indica, detectan choques.
Compás: Indica a orientación actual. Cámara: É sen dúbida a máis complexa dos sensores, pero tamén a que máis información pode ofrecer.
Axentes
Motores: realizan os movementos necesarios paira a navegación: dous paira translación e un paira rotación.


Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







