



Historique des pilotes
En bref, la technique de contrôle nécessaire pour conduire le robot est connue depuis longtemps et peut être trouvée dans de nombreux processus industriels.
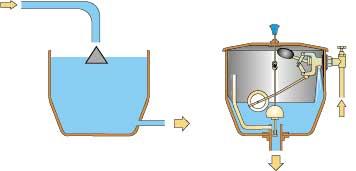
L'étude des contrôleurs qui sont apparus au fil des ans permet de trouver des éléments provenant de l'antiquité. Ainsi, XVII. Jusqu'au XXe siècle, les systèmes pour contrôler le niveau de liquide d'une lampe à huile ou maintenir le niveau d'un récipient à vin (même si elle remplit de nombreux verres) sont des systèmes de contrôle. Dans ce type de système, le niveau du fluide de contrôle du flux est contrôlé, car le flux à travers un trou est proportionnel à la pression. L'outil qui a été inventé autrefois pour contrôler le niveau de fluide est un flotteur qui est encore utilisé dans les réservoirs des toilettes. À mesure que le niveau de fluide diminue, le flux d'alimentation augmente et lorsque le niveau augmente, le flux d'alimentation diminue, éliminant le cas échéant. La figure 1 montre la présentation de cet outil et le schéma d'un dépôt dans les salles de bains actuelles. Dans ce système, le capteur et l'entraînement sont combinés en un seul dispositif (flotteur et tuyau d'alimentation).
XVII. et XIX. L'un des travaux parus pendant des siècles est le contrôle de température dans le four conçu par Drebbell (1620) et pour chauffer l'incubateur de poulets. La figure 2 présente la conception de ce contrôle. Le four est formé par une boîte avec feu interne et un tube avec régulateur de tir. A l'intérieur de la chambre de combustion se trouve un incubateur à poulets à double paroi qui remplit d'eau la séparation entre ces murs. Le capteur de température est un récipient en verre rempli d'alcool et de mercure situé sur le tronçon mentionné.
Au fur et à mesure que le feu chauffe la boîte et l'eau, l'alcool se dilate et la tige que porte le flotteur monte en faisant descendre le régulateur de traction vers le tube. Lorsque la boîte est trop froide, l'alcool diminue et le régulateur s'ouvre et augmente la force du feu. La température désirée est donnée par la longueur de la tige portant le flotteur.
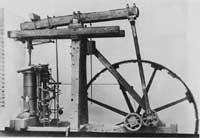
À cette même époque, le contrôle de la vitesse de rotation des axes était un problème urgent de contrôle automatique. Par exemple, le contrôle de la vitesse de la pierre d'un moulin à vent qui mouture le blé est un contrôle automatique. Parmi les différentes méthodes utilisées, le meilleur était le pendule conique ou basé sur le régulateur à billes. Ce dispositif était utilisé pour mesurer la vitesse du moulin. Mais l'application qui a rendu célèbre ce type de régulateurs était la machine à vapeur (Watt, 1788). La figure 3 montre la photographie et le schéma de cette machine et la figure 4 montre l'avant-plan du régulateur de la boule mobile.
L'action du régulateur centrifuge est facilement compréhensible. Supposons que la machine travaille sur son état d'équilibre et soudain la charge est appliquée. La vitesse de la machine est alors réduite et le cône formé par les billes du régulateur est réduit. Ainsi, l'angle formant des boules avec la verticale est utilisé comme capteur de sortie. Cette action consiste à ouvrir la vanne principale à vapeur (entraînement) et à faire passer plus de vapeur vers la machine pour récupérer la vitesse perdue. Pour maintenir la valve à vapeur dans cet état, les billes du régulateur doivent former un angle différent, de sorte que la vitesse obtenue après l'application de la charge ne sera pas exactement la même que la précédente.
Watt était un ingénieur pratique, qui a travaillé avec les moulins à vent avant, et n'a pas effectué une analyse théorique du régulateur. XIX. À la fin du XXe siècle, les études du système de contrôle mentionné sont devenues une simple pratique au cœur des analyses théoriques. C.V. Airy a enseigné les mathématiques et l'astronomie à l'Université de Cambridge entre 1826 et 35 et astronome de Greenwich entre 1835 et 81. Après de nombreuses études sur la vitesse, Airy a découvert que le régulateur du pendule pouvait avoir un mouvement instable. Airy est la première analyse de l'instabilité d'un système de contrôle. L'analyse, basée sur des équations différentielles, a été le début de l'analyse du contrôle de réaction.
Le premier travail systématique de stabilité dans le contrôle de la réalimentation était “On Governos” de Maxwell (1868). Dans ce travail, Maxwell a développé les équations différentielles du régulateur, les linéarisant autour du point d'équilibre. De cette façon, il a montré que la stabilité est associée aux racines d'une équation, c'est-à-dire que ces racines devaient avoir des parties réelles négatives.
Le problème du critère de stabilité, E.J., vainqueur de l'Adams de 1877. On peut voir qu'il a été résolu par Routh. Le critère développé dans l'essai qui a servi à gagner le prix est la technique qui continue à apprendre les ingénieurs de contrôle. L'analyse de l'équation caractéristique est restée la base de la théorie du contrôle dans Bell Telephone et H.S. Pour les inventions de Black, jusqu'à l'apparition de l'amplificateur électronique relancé en 1927.
A après l'apparition du travail de Routh. M. Le mathématicien russe Lyapuntov a commencé à étudier le problème de la stabilité du mouvement et en 1892, il a utilisé les équations non linéaires du mouvement obtenir un résultat équivalent au critère de Routh. Son œuvre fut très importante, mais n'apparut pas écrite jusqu'en 1958.
XX. Si nous entrons dans le XIXe siècle, la Première Guerre mondiale, tout comme son importance dans l'amélioration de toutes les techniques, a eu une grande influence l'utilisation de systèmes de contrôle, par exemple le développement d'amplificateurs alimentés en 1945 H. W. Il est décrit dans un article écrit par Bode. Les amplificateurs électroniques ont permis de faire des appels longue distance dans les premières décennies de la Première Guerre mondiale.
Cependant, comme la distance augmente, la perte d'énergie électrique augmente également malgré le grand diamètre du fil de fer, et de plus en plus les amplificateurs nécessaires pour éviter les pertes. En conséquence, tant d'amplificateurs ont déformé en raison du manque de linéarité des tubes à vide utilisés. La solution à ce problème a été trouvée par Black dans la réalimentation : pour éviter la distorsion, une réaction croissante est nécessaire. Autrement dit, le gain mou de l'entraînement doit se développer. Quiconque a essayé d'augmenter le volume d'un amplificateur de rue, souffrirait de la même situation que Black, car l'absurdité de la réaction se déstabilise.
Ici (dans cette nouvelle technologie) il y avait le problème de stabilité mentionné par Maxwell et Routh, mais comme la dynamique était très complexe (équations d'ordre 50), le critère de Routh n'a pas beaucoup résolu. Les ingénieurs des communications étaient habitués à utiliser à la fois la réponse fréquentielle et les mathématiques de variables complexes développées par Cauchy, de sorte que les analyses des laboratoires Bell se concentraient sur un domaine complexe. En 1932, Nyquist publie un article sur la stabilité.
La stabilité était analysée par des graphiques de réponse fréquentielle du feuillet. À partir de cette théorie, il a développé une large méthode de conception des amplificateurs réalimentés.
Avec l'amplificateur realimenté, il a commencé à utiliser le contrôle realimenté également dans les processus industriels. Dans ce domaine, dans des processus complexes, sans linéarité et avec de grands retards entre le capteur et l'actionneur, le contrôle, proportionnel, intégral et dérivatif, auquel font référence Callender, Hartree et Porter (1936), a commencé à être utilisé.
Cette technologie, basée sur des travaux expérimentaux et des approches de linéarisation, a développé des méthodes de « tuning » pour sélectionner les valeurs appropriées des paramètres du contrôleur PID. À cette époque, apparurent les dispositifs de conduite et de contrôle d'avions (notamment le développement de capteurs pour mesurer la hauteur et la vitesse des avions), présentant le rapport de contrôle en la matière en 1973 Mc Ruer.
Pendant la Seconde Guerre mondiale, un grand élan a été donné au contrôle de la réalimentation. Aux États-Unis, les ingénieurs et les mathématiciens du laboratoire du MIT ont combiné leurs connaissances pour développer l'amplificateur realimenté de Bode, le contrôle PID des processus et les théories du contrôle des processus stochastiques de Wiener (1930). Le résultat a été le développement de toute la technique de conception de mécanismes de contrôle ou de serbomecanismes. Beaucoup de ces travaux ont été publiés et recueillis au Laboratoire de radiation (James, Michols et Philips, 1947).
En 1948, W.R. a développé une nouvelle vision dans la conception des systèmes de contrôle. Evans. Cela travaillait avec des systèmes de conduite et de contrôle des avions. Beaucoup de problèmes qui apparaissent présentent des situations dynamiques instables ou presque instables et Evans a pensé revenir à l'étude de l'équation caractéristique, c'est-à-dire aux travaux de Maxwell et Routh.
Evans a développé des techniques et des règles pour suivre graphiquement la disposition géométrique des racines de l'équation caractéristique quand un paramètre est modifié. Sa méthode, la disposition géométrique des racines, est très approprié pour l'analyse et la conception de la stabilité et reste une technique importante aujourd'hui.
Dans les années 50, Bellman et Kalman sont retournés aux États-Unis et Pontryagin Russie à utiliser des équations différentielles comme modèles de systèmes de contrôle. Beaucoup de ces travaux sont apparus comme la zone de contrôle des satellites artificiels a été développé. En outre, les calculs qui ne pouvaient être effectués 10 ans plus tôt étaient effectués avec des ordinateurs numériques. Le travail de Lyapuntov a augmenté l'étude du contrôle optimal commencé par Wiener et Phillips pendant la guerre.
Ces travaux ont été présentés lors de la première conférence de la Fédération internationale de contrôle automatique tenue à Moscou en 1960. Ces opérations de contrôle ne sont pas basées sur la réponse fréquentielle ou sur l'équation caractéristique, mais sur les équations différentielles, ce qui a conduit à une large utilisation des ordinateurs. Ces méthodes sont appelées contrôle moderne.
Enfin, ces nouvelles techniques, apparues à partir des années 70, incluent le contrôle sur les systèmes non linéaires, le contrôle d'adaptation, le contrôle fuzzy ou le contrôle multivarié. Avec l'apparition de l'ordinateur, la capacité à effectuer des calculs compliqués et la possibilité d'utiliser des algorithmes complexes a été élargie. Le développement de techniques de contrôle moderne a donc constitué une avancée spectaculaire jusqu'à devenir de plus en plus utilisées aujourd'hui.
C'est pourquoi un ingénieur bien préparé doit apprendre et maîtriser de nombreuses techniques pour trouver la réponse la plus appropriée à un problème. En outre, sur la base de ces techniques, vous devez être en mesure d'utiliser et d'analyser les calculs effectués sur l'ordinateur.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







