



Errealitate birtuala mende bukaera honetako iraultzarik handiena izan da hainbat alorretan erakutsi duen erabilgarritasuna dela eta. Azken aurrerakuntza tekniko eta informatikoei esker, industriako sistema mekanikoen diseinuan erabiltzen ari da, batez ere konplexitate edo zailtasun handiko sistemetan. Horrela CEIT ikerketa-zentroan bertan, industrian aplikazioa duten beste simuladoreak sortzen ari dira. Besteak beste, autoen suspentsio-sistemaren portaera aztertzeko eta eraikuntzarako makinaria astunaren erabileran trebatzeko errealitate birtualeko erremintak garatu dira azken urteotan.
Espazioko inguruneak simulatzen dituen erreminta hau ESA/ESTEC Espazioko Agentzia Europarrak eskatuta burutu dute CEIT-en. Bere helburua espazioko ingurune konplexuen simulazio interaktiboa da, misio espazialen inguruan dauden objektu mugikari guztien portaera aurreikusteko balio duena, hala nola espaziuntziak, robotak, objektu flotatzaileak eta astronautak. Era honetan espazio-estazioaren diseinu-zikloa hobetu nahi da, sistemak denbora errealean izango lukeen portaera grafikoki bisualiza baitaiteke.
Programak hainbat eszenario sortzeko aukera ematen du. Eszenario hauek ISSA estazioak Lurraren orbitan aurki ditzakeen inguruneak modelizatuko dituzte, programaren erabiltzaileari edozein eszenario sortzeko aukera emanez. Hauek dira programak eskaintzen dituen elementuak:
Espaziuntziak: Issa nazioarteko espazio-estazioa eraikuntzaren hiru fasetan sar daiteke eszenarioan. MIR espazio-estazioa eta Shuttle espaziuntzia ere sartzeko aukera ere badago.
Planetak: Programak Lurraren, Ilargiaren eta Eguzkiaren mugimenduak eta eragina modelizatzeko aukera ematen du. Horrela, denbora errealean planetek duten posizioa ikus daiteke, gauak, egunak, eklipseak etab. eraginez.
Urrutitik Kontrolatutako Kamera: Kamera hau objektu hegalari bezala erabil daiteke eta tresna ezin hobea da edozein posiziotik eszenarioaren ikuspegiak lortzeko. Era guztietako irudiak eskaintzen ditu; adibidez, astronauta batek bere begiez ikusiko lituzkeen irudiak ikus daitezke bere buruan kamera hauetako bat kokatuz. Bi modelo daude:
- Modelo Dinamikoa: Kamera espazioko edozein objektu hegalariren antzera, inertziadun objektu bezala kontsideratzen da. Propultsio sistema batez horniturik dago eta mugimendua lortzeko koheteei inpultsuak eragiten zaizkie nahi den abiadura lortu arte.
- Modelo Zinematiko Sinplifikatua: Kamerak ez du inertziarik eta, beraz, ez da propultsio-sistemarik kontuan hartzen.
Bestalde, kameraren irudiek zarataren eta argiaren ondorioz jasango luketen degradazioa ere kontuan hartu da, errealitate handiko irudiak eskaintzeko asmoz.
Objektu Flotatzaileak: Espazioan flotatzen dauden objektuak modelizatzeko aukera ere badago. Objektu hauek orbiten mekanikaren legeei jarraitzen diete eta mugiarazteko joystick-aren bidez indar aldakorreko pultsuak emateko aukera dago.
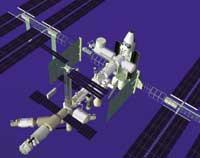
Sistema Mekanikoak: CEITen garatutako COMPAMM simulazio-programaren bidez ERA beso itxurako robota kontrola daiteke. Robot hau ISSA nazioarteko espazio-estazioko modulu nagusian kokaturik dago eta moduluen kanpoaldeko konponketak egiteko erabiliko da besteak beste. Bi atalez osatutako sistema mekanikoa da eta sei askatasun-gradu ditu bere betebeharrak egin ahal izateko. ERA robota bai interfaze konbentzionalaren bidez eta bai kontrol-kaxa birtual baten bidez kontrola daiteke. Azken hau programaren pantailan dago eta erakusle baten bidez erabil daiteke robotaren besoak mugitu eta objektuei heltzeko.
Gizakiak: Astronauten EVA edo Espaziuntziz Kanpoko Jarduerak DYNAMAN simulazio-erremintaren bidez modelizatu dira. Erreminta hau CEITen garatu da giza gorputzaren mugimenduak espazioan simulatzeko. Besteak beste astronauten jantziek dituzten mugimendu-oztopoak kontuan hartzen ditu eta giza-mugimendu guztiak irudikatzeko 36 askatasun-gradutako sisteman oinarriturik dago.
Simuladorearen Softwarea Objektuei Zuzendutako Programazioan oinarriturik dago, eta horretarako C++ lenguaia erabili da. Programa hainbat modulutan banaturik dago, ondoko eskeman ikus daitekeen bezala. Modulu nagusia denbora errealeko kontrol-modulua da, beste moduluak kontrolatzen dituena. Eszenarioetako sistema mekanikoen mugimendua independenteki kontrolatzen da simulazio-moduluetan.
Programaren ezaugarri garrantzitsuenetako bat 3 dimentsiotako bisualizazioa da. Simuladoreak Errealitate Birtualean murgiltzeko bi modu ematen ditu: irudi estereografikozko betaurrekoen bidez edo errealitate birtualeko HMD kaskoaren bidez. Lehenengoa simulazio sinpleetarako eta programaren prestaketarako erabiltzen da, ez baitu bigarrenak eskaintzen duen murgiltze-efektua sortzen.
Sistemaren hardwarea 4 CPUz horniturik dago. Bestalde, kalitate handiko irudiak lortzeko segundoko 30-60 irudi sortzen dituen sistema garatu da, era honetan kalitate handiko ehundura, argi-iturriak eta isla lor daitezkeelarik. Irudiak sortzeko prestazio handiko SGI Onyx lan-estazio grafiko bat erabili da Reality Engine 2 tarjeta grafikoaz horniturik.
Ugarte, Haritz







