



Sistemes de posicionament per satèl·lit diversos
Per a poder viatjar de manera eficaç des del punt A fins al punt B, és necessari conèixer la seva ubicació exacta. Des de fa dos mil anys, la humanitat ha buscat aquest objectiu. XVI. i XVII. comerç i colonització dels segles XX. Les fredes i caloroses guerres del segle XX ens han portat a conèixer aquests punts amb una precisió de mil·límetres. Per a això han estat necessaris els avanços en matemàtiques, astronomia i rellotgeria.
Per a una correcta navegació, primer és necessari establir un sistema de referència o de coordenades. Els antics grecs sabien que la Terra era esfèrica i, pel que sembla, tenien una idea pròxima de la seva grandària. Amb pocs canvis, el seu sistema de referència ha arribat a l'actualitat: el sistema de latitud i longitud.
La definició i mesura de la latitud va ser senzilla, ja que existia una referència natural, l'equador, i tots dos pols distaven 90° respecte a l'equador. Tot això era fàcil de mesurar gràcies a l'estrella polar. No obstant això, la mesura de longitud va resultar més complicada, ja que no existia cap referència natural per al mesurament. El XVII va ser la creació de sistemes de mesurament de longitud. i XVIII. Treball de diversos científics i artesans de segles. La precisió en la longitud estava íntimament relacionada amb el mesurament del temps, ja que la Terra en 24 hores fa un volt de 360°, és a dir, 15° per hora. Així, si es pot conèixer la diferència entre les hores locals de dos llocs, es pot conèixer també la diferència de longitud entre elles.
El fuster britànic John Harrison (1693-1776), en 1761, va guanyar el premi de 20.000 lliures, en una època de fortuna, per crear el rellotge més precís que es va inventar fins llavors. El rellotge pesava 27 kg i provocava un error diari d'un només segon. Per exemple, caldria passar mil anys perquè el cristall de quars que porten els rellotges actuals ocasionés un error d'un segon. El cronògraf d'Harrison va permetre per primera vegada en la història mesurar la longitud amb una precisió acceptable.
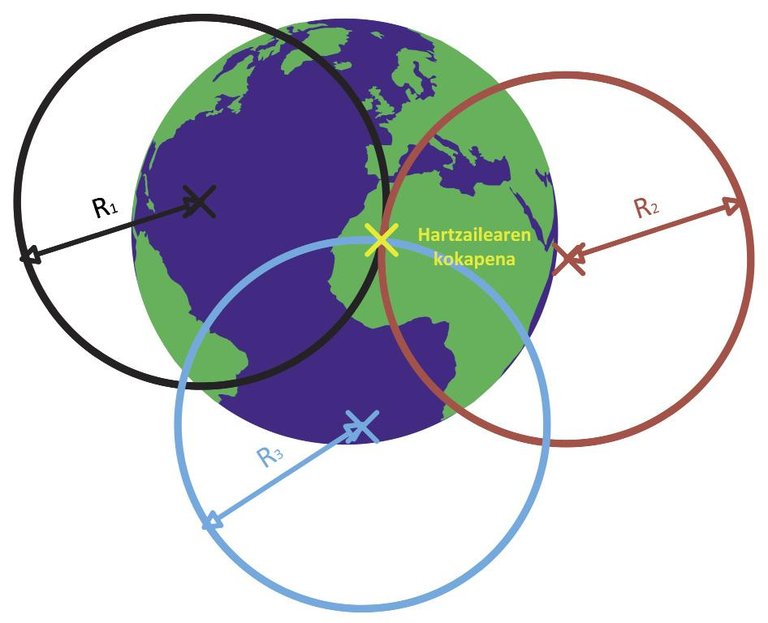
XX. En el segle XX, el descobriment dels dispositius de ràdio i les ones de ràdio va revolucionar el món de la navegació. Aviat es van adonar que les ones de ràdio es propagaven a una velocitat determinada. Desgraciadament, una vegada més, el problema principal va ser el de mesurar el temps. De fet, la velocitat de propagació de les ones de ràdio feia que es necessitessin rellotges cada vegada més precisos per a realitzar mesuraments amb precisió notable. Bàsicament, si es coneix exactament la ubicació de l'estació de transmissió k (x k ,i k ,z) i el moment de transmissió, seria fàcil calcular la distància entre aquesta i el receptor (d k). Per tant, el procediment denominat trilateración permet calcular la posició del receptor (x,i,z) quan es coneixen almenys 3 punts i moments de transmissió.
? ,(x{x1)2+(i{y1)2+(z{z1)2 = d1
> ,(x{x2)2+(i{y2)2+(z{z2)2 = d2
? ,(x{x3)2+(i{y3)2+(z{z3)2 = d3
Per descomptat, per a això és clau mesurar amb precisió el temps. A més, el receptor ha de rebre ones de ràdio, per al que és necessari que els punts de transmissió siguin accessibles en tot moment o, més ben dit, visibles. En 1957, just en el moment en què la Unió Soviètica va posar en òrbita el satèl·lit Sputnik 1, científics de tot el món es van adonar que no pertocava més apropiat que l'òrbita al voltant de la Terra en tot moment i en tot lloc per a establir els transmissors disponibles. Després de la competència espacial dels anys 60, els estatunidencs van començar a desenvolupar el conegut sistema GPS, però fins a 1995 no va ser operatiu i van passar 7 anys més, fins que el govern de Clinton va fer pública el senyal de precisió militar. Poc després, els russos van començar a competir, però no van aconseguir que el sistema GLONASS estigués 100% disponible fins a 2011.
A pesar que els Estats Units i la Unió Soviètica són pioners en els sistemes de posicionament per satèl·lit, en l'actualitat diverses agències espacials i governs estan fent passos per a construir el seu propi sistema. Entre altres, l'any 2000, AQUESTA (Agència Espacial Europea) va començar a desenvolupar el sistema Galileu. A pesar que inicialment havia de ser operatiu per a l'any 2008 i oferir una precisió mundial de 4 m (10 vegades superior al GPS), les tensions polítiques dels Estats membres del projecte i la pressió del Govern dels Estats Units encara es troba en fase de desenvolupament. Segons les últimes previsions de l'AQUESTA, s'espera que estigui disponible per a l'any 2020.
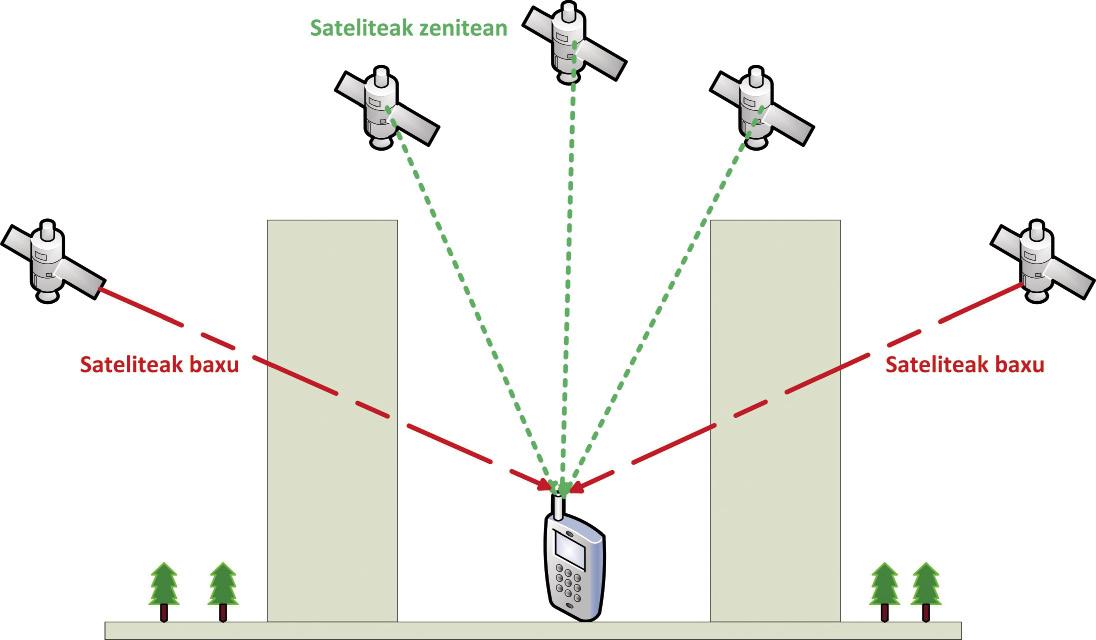
la Xina també ha fet passos amb el sistema anomenat BeiDou. Aquest sistema, que va començar a desenvolupar-se en 2006, és ja de gran utilitat en la zona d'Àsia-Pacífic. el Japó i l'Índia també compten amb els seus propis sistemes, QZSS (Sistema de Navegació Ia Zenit) i IRNSS (Sistema de Navegació per Satèl·lit de la Regió Índia), respectivament, encara que en lloc de ser sistemes autònoms, només funcionen com a «auxiliars» d'altres sistemes. Per exemple, el QZSS japonès ofereix un senyal més fort en determinats entorns. Tots els satèl·lits de la constel·lació es troben en tot moment en un gran angle d'elevació, per sobre del receptor, d'aquí el seu nom. D'aquesta forma s'aconsegueix evitar les vies de propagació obstaculitzades pels edificis, arribant clarament el senyal GPS als canons urbans tan habituals al Japó.
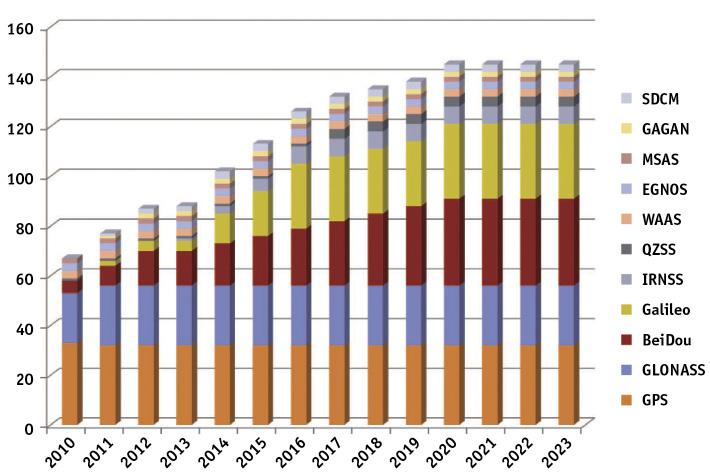
Si es compleixen les previsions de les agències espacials, en pocs anys es milloraran els sistemes convencionals i es posaran en marxa nous sistemes. D'aquesta manera, el nombre de satèl·lits dels sistemes de navegació experimentarà un notable augment.
A pesar que els sistemes de satèl·lit disponibles en l'actualitat són tan nombrosos i diferents, tots tenen un funcionament similar, el de la trilateración anteriorment esmentada. Normalment, els satèl·lits tenen una òrbita Kepler per a calcular la seva posició i emeten un missatge amb el paràmetre del temps. Aquest missatge es modula amb un senyal cíclic PRN (soroll pseudoaleatori) de certa longitud i freqüència. Encara que el senyal PRN té un espectre similar al soroll blanc en el domini de freqüència, segueix una seqüència preestablerta. D'aquesta forma, mitjançant correlació es pot calcular en quin moment es rep el senyal en el codi PRN. El satèl·lit també emet paràmetres que relacionen el moment del codi PRN amb el moment del temps. Per tant, coneixent el temps d'emissió i els temps de recepció, es coneix immediatament la distància recorreguda pel senyal d viatjada = (captura - t emissió ) x c, on c és la velocitat de la llum.
No obstant això, aquest mètode té dos problemes principals: primer, encara que tots els rellotges dels satèl·lits d'un determinat sistema estiguin sincronitzats exactament, el rellotge del satèl·lit i el rellotge del receptor no estan sincronitzats. A més, la precisió dels rellotges atòmics de rubidi dels satèl·lits no és comparable al rellotge de quars que tenen els nostres mòbils. La solució a aquest problema és senzilla. Al procediment de la trilateración s'afegeix una nova variable que mostra la diferència temporal entre receptor i emissor (dt). Per tant, en aquest cas cal utilitzar almenys quatre satèl·lits:
| ,(x{x1)2+(i{y1)2+(z{z1)2 +?t= d1
| ,(x{x2)2+(i{y2)2+(z{z2)2 +?t= d2
| ,(x{x3)2+(i{y3)2+(z{z3)2 +?t= d3
| ,(x{x4)2+(i{y4)2+(z{z4)2 +?t= d4
El segon problema és més complex. De fet, fins ara la difusió del senyal s'ha considerat uniforme i constant. En la realitat, no obstant això, són diversos els fenòmens que poden alterar la propagació del senyal. Per exemple, la capa atmosfèrica, anomenada ionosfera, que es troba entre els 100 i 600 km de la superfície terrestre, està formada per partícules ionitzades per radiació solar. Aquesta càrrega elèctrica modifica la velocitat i el mitjà de propagació de les ones de ràdio. D'altra banda, en la part més pròxima a la superfície terrestre, la troposfera, acumula el 80% de la massa atmosfèrica terrestre. Es tracta principalment de vapor d'aigua, que també modifica l'índex de refracció de l'aire i, per tant, la via de propagació de les ones. Finalment, en la pròpia superfície, la reflexió, l'ampliació multicanal (multi-path propagation) i els obstacles viaris també desvian el senyal. La dificultat per a modelar detalladament aquests efectes és la principal font d'error en la precisió del sistema de navegació per satèl·lit.
Aquests errors poden ser corregits en gran manera mitjançant el sistema DGPS (Sistema Diferencial de Posicionament Mundial). Aquests sistemes es basen en estacions de mesura en terra. Les estacions de mesura calculen la seva posició utilitzant satèl·lits del sistema GPS o satèl·lits propis i, en conèixer amb precisió la seva ubicació, calculen la diferència entre la ubicació calculada i la real. A continuació es pot comptar l'error dels efectes atmosfèrics i transmetre'l per radi a qui pugui interessar. Aquest sistema permet millorar la precisió de posició de 10 a 0,2 m. Per descomptat, els principals usuaris del DGPS provenen del món de l'aviació, la cartografia i l'àmbit militar. Cada país o entitat utilitza el seu propi sistema DGPS, per exemple: WAAS estatunidenc, EGNOS europeu, GAGAN indi, MSAS japonès i SDCM rus.
Per tant, és evident que en el futur es tendirà a utilitzar tots els sistemes disponibles a través de receptors capaços d'utilitzar simultàniament diversos sistemes de satèl·lit. Aquests receptors ofereixen nombrosos avantatges. Per exemple, s'ofereix un servei més fiable, ja que si alguns sistemes de satèl·lit no poguessin ser utilitzats intencionadament o involuntàriament, podrien ser alternatives. Òbviament, si augmentem el nombre de satèl·lits, la zona en la qual el receptor seria eficient seria també més àmplia. A més, si el receptor, a més d'estar adaptat a múltiples sistemes, tingués la capacitat de rebre un senyal de diverses freqüències, seria més robust respecte a les interferències. D'altra banda, cal dir que aquest tipus de receptors també presenta desavantatges, ja que a més de tenir una major complexitat, no tots els sistemes de satèl·lit han estat pensats per a ser compatibles. És a dir, a vegades, la millora o informació que ofereixen els satèl·lits de tots dos sistemes a causa de la seva similar ubicació pot ser redundant.
Els receptors multi-satèl·lit no han pogut desenvolupar-se fins a dates recents de manera pràctica, ja que el GPS era l'únic sistema disponible. En els últims anys, no obstant això, l'obertura de GLONASS i BeiDou ha contribuït a l'aparició d'aquesta mena de receptors. Per exemple, els últims models mòbils d'Apple i Samsung ofereixen una ubicació mitjançant GPS + GLONASS, i el fabricant Xiaomi, que està en auge, ha incorporat a aquest binomi el sistema BeiDou en els seus últims models.
Conèixer on estem sempre ha estat la voluntat i la necessitat de les persones. Hem passat d'una època de desconeixement a un coneixement ràpid i precís de la nostra posició en qualsevol lloc i en qualsevol moment. En les últimes dècades, a més, les tecnologies de posicionament per satèl·lit han experimentat un gran auge. Una vegada més, s'ha constatat que la col·laboració de diverses nacions i institucions permet avanços notables en l'àmbit científic, tècnic i social.
Bibliografia
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







