



Sistemas de posicionamento por satélite diversos
Paira poder viaxar de forma eficaz desde o punto A até o punto B, é necesario coñecer a súa localización exacta. Desde fai dous mil anos, a humanidade buscou ese obxectivo. XVI. e XVII. comercio e colonización dos séculos XX. As frías e calorosas guerras do século XX leváronnos a coñecer estes puntos cunha precisión de milímetros. Paira iso foron necesarios os avances en matemáticas, astronomía e reloxaría.
Paira una correcta navegación, primeiro é necesario establecer un sistema de referencia ou de coordenadas. Os antigos gregos sabían que a Terra era esférica e, ao parecer, tiñan una idea próxima do seu tamaño. Con poucos cambios, o seu sistema de referencia chegou á actualidade: o sistema de latitude e lonxitude.
A definición e medida da latitude foi sinxela, xa que existía una referencia natural, o ecuador, e ambos os polos distaban 90º respecto ao ecuador. Todo isto era fácil de medir grazas á estrela polar. Con todo, a medida de lonxitude resultou máis complicada, xa que non existía ningunha referencia natural paira a medición. O XVII foi a creación de sistemas de medición de lonxitude. e XVIII. Traballo de varios científicos e artesáns de séculos. A precisión na lonxitude estaba intimamente relacionada coa medición do tempo, xa que a Terra en 24 horas dá una volta de 360°, é dicir, 15° por hora. Así, si pódese coñecer a diferenza entre as horas locais de dous lugares, pódese coñecer tamén a diferenza de lonxitude entre elas.
O carpinteiro británico John Harrison (1693-1776), en 1761, gañou o premio de 20.000 libras, nunha época de fortuna, por crear o reloxo máis preciso que se inventou até entón. O reloxo pesaba 27 kg e provocaba un erro diario dun só segundo. Por exemplo, habería que pasar mil anos para que o cristal de cuarzo que levan os reloxos actuais ocasionase un erro dun segundo. O cronógrafo de Harrison permitiu por primeira vez na historia medir a lonxitude cunha precisión aceptable.
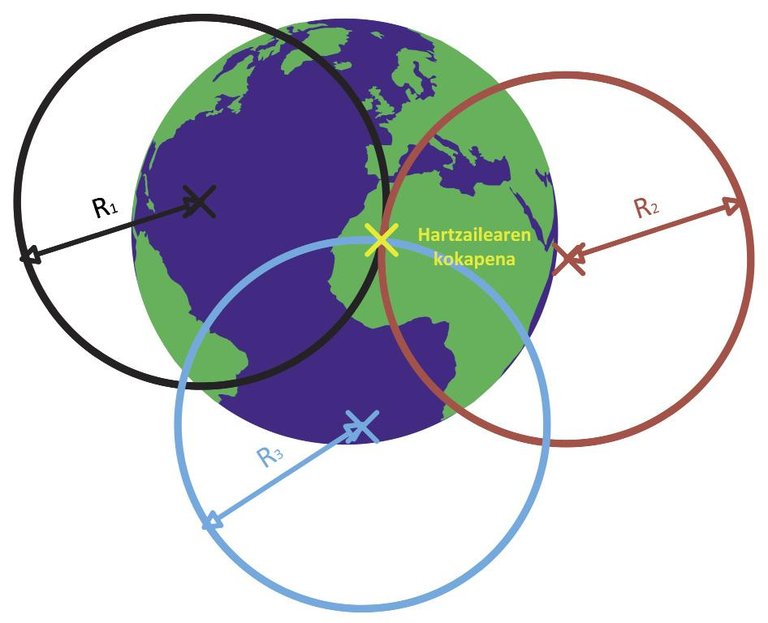
XX. No século XX, o descubrimento dos dispositivos de radio e as ondas de radio revolucionou o mundo da navegación. Pronto se deron conta de que as ondas de radio propagábanse a unha velocidade determinada. Desgraciadamente, una vez máis, o problema principal foi o de medir o tempo. De feito, a velocidade de propagación das ondas de radio facía que se necesitasen reloxos cada vez máis precisos paira realizar medicións con precisión notable. Basicamente, se se coñece exactamente a localización da estación de transmisión k (x k ,e k ,z) e o momento de transmisión, sería fácil calcular a distancia entre esta e o receptor (d k). Por tanto, o procedemento denominado trilateración permite calcular a posición do receptor (x,e,z) cando se coñecen polo menos 3 puntos e momentos de transmisión.
? ,(x{x1)2+(e{y1)2+(z{z1)2 = d1
> ,(x{x2)2+(e{y2)2+(z{z2)2 = d2
? ,(x{x3)2+(e{y3)2+(z{z3)2 = d3
Por suposto, paira iso é clave medir con precisión o tempo. Ademais, o receptor debe recibir ondas de radio, paira o que é necesario que os puntos de transmisión sexan accesibles en todo momento ou, mellor devandito, visibles. En 1957, xusto no momento en que a Unión Soviética puxo en órbita o satélite Sputnik 1, científicos de todo o mundo déronse conta de que non había lugar máis apropiado que a órbita ao redor da Terra en todo momento e en todo lugar paira establecer os transmisores dispoñibles. Tras a competencia espacial dos anos 60, os estadounidenses comezaron a desenvolver o coñecido sistema GPS, pero até 1995 non foi operativo e pasaron 7 anos máis, ata que o goberno de Clinton fixo pública o sinal de precisión militar. Pouco despois, os rusos empezaron a competir, pero non conseguiron que o sistema GLONASS estivese 100% dispoñible até 2011.
A pesar de que Estados Unidos e a Unión Soviética son pioneiros nos sistemas de posicionamento por satélite, na actualidade varias axencias espaciais e gobernos están a dar pasos paira construír o seu propio sistema. Entre outros, no ano 2000, ESA (Axencia Espacial Europea) comezou a desenvolver o sistema Galileo. A pesar de que inicialmente debía ser operativo paira o ano 2008 e ofrecer una precisión mundial de 4 m (10 veces superior ao GPS), as tensións políticas dos Estados membros do proxecto e a presión do Goberno de Estados Unidos aínda se atopa en fase de desenvolvemento. Segundo as últimas previsións da ESA, espérase que estea dispoñible paira o ano 2020.
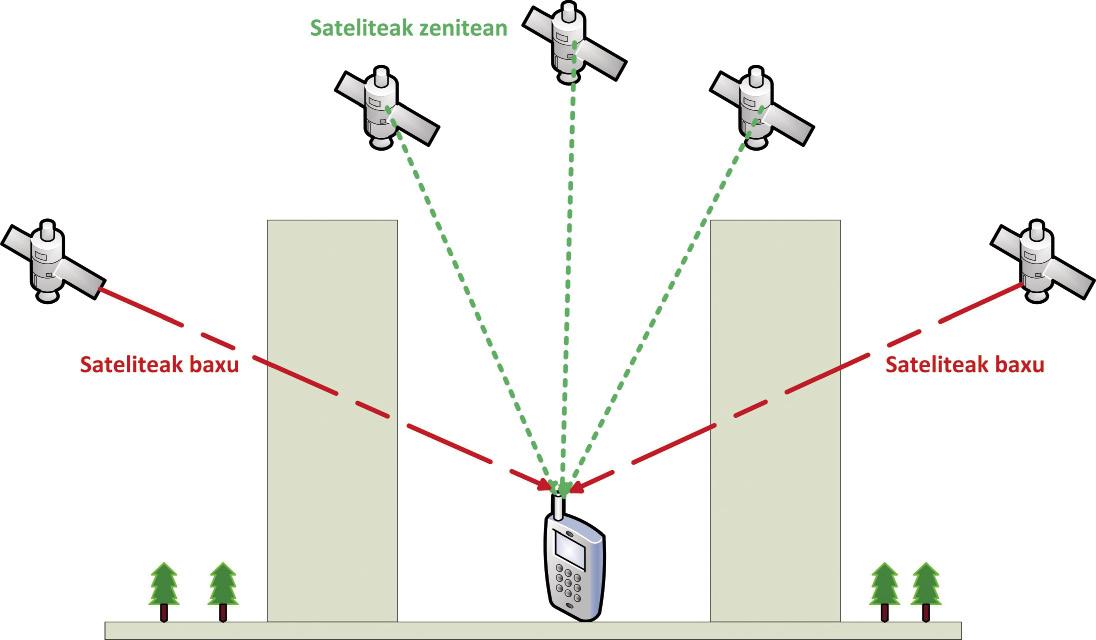
China tamén deu pasos co sistema chamado BeiDou. Este sistema, que comezou a desenvolverse en 2006, é xa de gran utilidade na zona de Asia-Pacífico. Xapón e India tamén contan cos seus propios sistemas, QZSS (Sistema de Navegación Ia Zenit) e IRNSS (Sistema de Navegación por Satélite da Rexión India), respectivamente, aínda que en lugar de ser sistemas autónomos, só funcionan como «auxiliares» doutros sistemas. Por exemplo, o QZSS xaponés ofrece una sinal máis forte en determinadas contornas. Todos os satélites da constelación atópanse en todo momento nun gran ángulo de elevación, por encima do receptor, de aí o seu nome. Desta forma conséguese evitar as vías de propagación obstaculizadas polos edificios, chegando claramente o sinal GPS aos canóns urbanos tan habituais en Xapón.
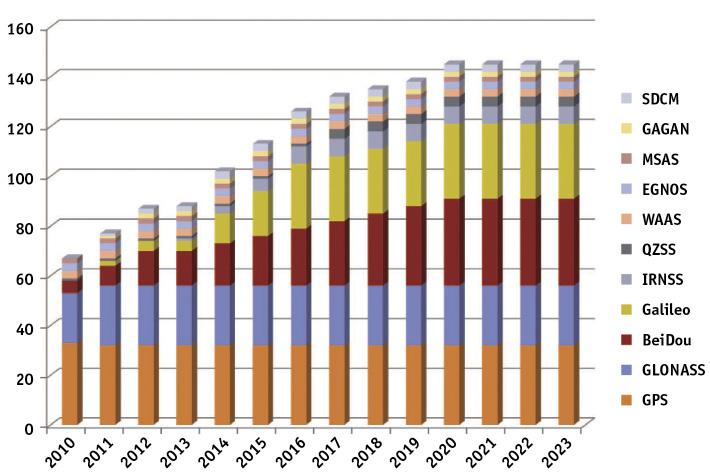
Se se cumpren as previsións das axencias espaciais, en poucos anos melloraranse os sistemas convencionais e poranse en marcha novos sistemas. Deste xeito, o número de satélites dos sistemas de navegación experimentará un notable aumento.
A pesar de que os sistemas de satélite dispoñibles na actualidade son tan numerosos e diferentes, todos teñen un funcionamento similar, o da trilateración anteriormente mencionada. Normalmente, os satélites teñen una órbita Kepler paira calcular a súa posición e emiten unha mensaxe co parámetro do tempo. Esta mensaxe se modula cun sinal cíclico PRN (ruído pseudoaleatorio) de certa lonxitude e frecuencia. Aínda que o sinal PRN ten un espectro similar ao ruído branco no dominio de frecuencia, segue una secuencia preestablecida. Desta forma, mediante correlación pódese calcular en que momento recíbese o sinal no código PRN. O satélite tamén emite parámetros que relacionan o momento do código PRN co momento do tempo. Por tanto, coñecendo o tempo de emisión e os tempos de recepción, coñécese de inmediato a distancia percorrida polo sinal d viaxada = (captura - t emisión ) x c, onde c é a velocidade da luz.
Con todo, este método ten dous problemas principais: primeiro, aínda que todos os reloxos dos satélites dun determinado sistema estean sincronizados exactamente, o reloxo do satélite e o reloxo do receptor non están sincronizados. Ademais, a precisión dos reloxos atómicos de rubidio dos satélites non é comparable ao reloxo de cuarzo que teñen os nosos móbiles. A solución a este problema é sinxela. Ao procedemento da trilateración engádese una nova variable que mostra a diferenza temporal entre receptor e emisor (dt). Por tanto, neste caso hai que utilizar polo menos catro satélites:
| ,(x{x1)2+(e{y1)2+(z{z1)2 +?t= d1
| ,(x{x2)2+(e{y2)2+(z{z2)2 +?t= d2
| ,(x{x3)2+(e{y3)2+(z{z3)2 +?t= d3
| ,(x{x4)2+(e{y4)2+(z{z4)2 +?t= d4
O segundo problema é máis complexo. De feito, até agora a difusión do sinal considerouse uniforme e constante. Na realidade, con todo, son varios os fenómenos que poden alterar a propagación do sinal. Por exemplo, a capa atmosférica, chamada ionosfera, que se atopa entre os 100 e 600 km da superficie terrestre, está formada por partículas ionizadas por radiación solar. Esta carga eléctrica modifica a velocidade e o medio de propagación das ondas de radio. Doutra banda, na parte máis próxima á superficie terrestre, a troposfera, acumula o 80% da masa atmosférica terrestre. Trátase principalmente de vapor de auga, que tamén modifica o índice de refracción do aire e, por tanto, a vía de propagación das ondas. Por último, na propia superficie, a reflexión, a ampliación multicanal (multi-path propagation) e os obstáculos viarios tamén desvian o sinal. A dificultade paira modelar detalladamente estes efectos é a principal fonte de erro na precisión do sistema de navegación por satélite.
Estes erros poden ser corrixidos en gran medida mediante o sistema DGPS (Sistema Diferencial de Posicionamento Mundial). Estes sistemas baséanse en estacións de medida en terra. As estacións de medida calculan a súa posición utilizando satélites do sistema GPS ou satélites propios e, ao coñecer con precisión a súa localización, calculan a diferenza entre a localización calculada e a real. A continuación pódese contar o erro dos efectos atmosféricos e transmitilo por radio a quen poida interesar. Este sistema permite mellorar a precisión de posición de 10 a 0,2 m. Por suposto, os principais usuarios do DGPS proveñen do mundo da aviación, a cartografía e o ámbito militar. Cada país ou entidade utiliza o seu propio sistema DGPS, por exemplo: WAAS estadounidense, EGNOS europeo, GAGAN indio, MSAS xaponés e SDCM ruso.
Por tanto, é evidente que no futuro tenderase a utilizar todos os sistemas dispoñibles a través de receptores capaces de utilizar simultaneamente varios sistemas de satélite. Estes receptores ofrecen numerosas vantaxes. Por exemplo, ofrécese un servizo máis fiable, xa que se algúns sistemas de satélite non puidesen ser utilizados intencionadamente ou involuntariamente, poderían ser alternativas. Obviamente, se aumentamos o número de satélites, a zona na que o receptor sería eficiente sería tamén máis ampla. Ademais, se o receptor, ademais de estar adaptado a múltiples sistemas, tivese a capacidade de recibir una sinal de varias frecuencias, sería máis robusto respecto das interferencias. Doutra banda, hai que dicir que este tipo de receptores tamén presenta desvantaxes, xa que ademais de ter una maior complexidade, non todos os sistemas de satélite foron pensados paira ser compatibles. É dicir, en ocasións, a mellora ou información que ofrecen os satélites de ambos os sistemas debido á súa similar localización pode ser redundante.
Os receptores multi-satélite non puideron desenvolverse até datas recentes de forma práctica, xa que o GPS era o único sistema dispoñible. Nos últimos anos, con todo, a apertura de GLONASS e BeiDou contribuíu á aparición deste tipo de receptores. Por exemplo, os últimos modelos móbiles de Apple e Samsung ofrecen una localización mediante GPS + GLONASS, e o fabricante Xiaomi, que está en auxe, incorporou a este binomio o sistema BeiDou nos seus últimos modelos.
Coñecer onde estamos sempre foi a vontade e a necesidade das persoas. Pasamos dunha época de descoñecemento a un coñecemento rápido e preciso da nosa posición en calquera lugar e en calquera momento. Nas últimas décadas, ademais, as tecnoloxías de posicionamento por satélite experimentaron un gran auxe. Una vez máis, constatouse que a colaboración de diversas nacións e institucións permite avances notables no ámbito científico, técnico e social.
Bibliografía
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







