



Exploradors transterrestres
Els riscos de viatjar a Mart i les raons econòmiques han fet que l'ésser humà encara no pugui arribar a ella. Però en el seu lloc ja ha enviat a uns exploradors especials: robots.
En 1997 arriba a Mart el primer robot de la NASA: Robot Sojourner. En 2004 van arribar dos robots bessons a inspeccionar el planeta vermell: Spirit i Opportunity . Encara que inicialment la seva missió havia de durar 3 mesos, Opportunity continua treballant! Spirit, per part seva, va enviar el seu últim senyal en 2010.
Finalment, a l'agost de 2012 va arribar a Mart el robot Curiosity (veure figura 1). Curiosity pot ser considerat el germà major dels seus antecedents. Més avançada tecnològicament, de major grandària, ja està estudiant la superfície terrestre i l'atmosfera de Mart, utilitzant tots els sensors i aparells al seu abast.
Laboratori científic de Mart
Curiosity no és només un robot, és un laboratori complet amb ambiciosos objectius científics. Els seus objectius són:
· Determinar si hi ha hagut alguna forma de vida en Mart.
· Conèixer el clima de Mart.
· Estudi de la geologia marciana.
· Col·laborar en la preparació de futurs viatges humans.
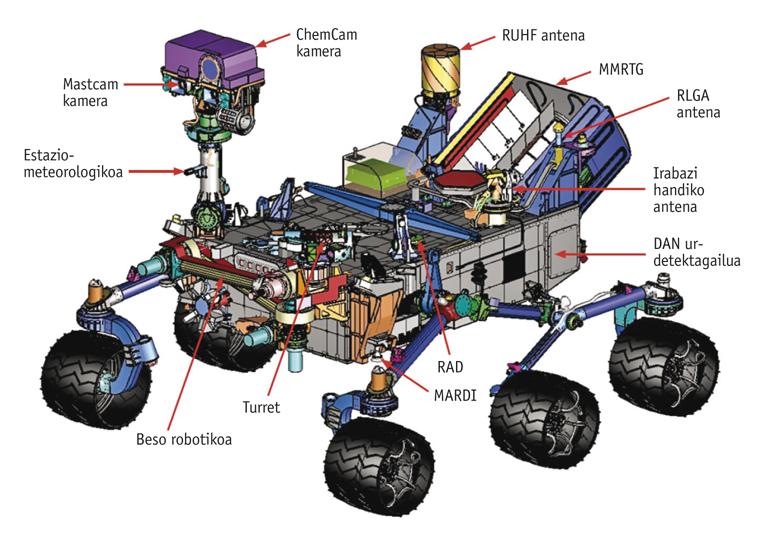
Per al bon acompliment del treball, el robot s'ha convertit en un laboratori mòbil, dotat d'equips de màxim nivell. En la figura 2 es mostren els principals dispositius del robot. En resum, Curiosity compta amb 17 càmeres amb diferents objectius, antenes de comunicació amb la Terra, un braç robòtic amb sensors i onze aparells per a l'anàlisi de mostres de sòl. Destaquen sobretot el dispositiu de detecció d'aigua DONEN i l'estació d'estudi climàtic (REMS).
A més de que tot això sigui tremend, Curiosity necessita la capacitat de desplaçar-se per a fer el seu treball, recollir un munt de dades i fer-los arribar als investigadors de la Terra. És a dir, el nostre robot ha de moure's per Mart per a arribar als llocs més interessants i posar en marxa allí els seus aparells. Per descomptat, per a això té les sis rodes. També un braç robòtic. Per tant, sembla que bastaria amb tenir una persona en la Terra que sàpiga conduir el robot amb la informació que reben les cambres de Curiosity. Seria com un videojoc. O no?
Necessitat de robots autònoms
Des de la terra no es pot conduir un robot que està en Mart. Dos són les raons principals que fan impossible:
1) Retard en la comunicació: Tenint en compte les posicions relatives de Mart i la Terra, un senyal triga entre 8 i 42 minuts a desplaçar-se.
2) Comunicació periòdica: La comunicació entre la Terra i Mart es realitza mitjançant unes sondes situades en l'òrbita de Mart. Aquestes sondes han d'estar orientades cap a la Terra per a poder emetre informació. En conseqüència, la comunicació amb el robot no pot ser contínua.
Així les coses, el control remot no és suficient. Necessitem una cosa més avançada si volem tenir èxit. La clau és l'autonomia.
Encara que el concepte d'autonomia és aplicable a moltes de les funcions dels robots, nosaltres ens centrarem en una capacitat: autonomia de la mobilitat o navegació autònoma. Aquesta habilitat és absolutament bàsica perquè un robot que està en un altre planeta sigui útil.
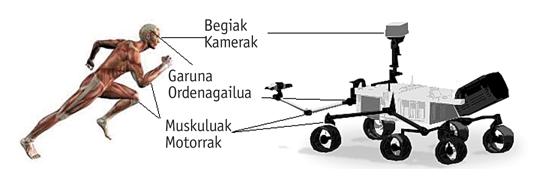
Els éssers humans tenim aquesta habilitat. Per a això, és imprescindible detectar l'entorn (els sentits), assajar el percebut (el cervell), prendre decisions sobre l'interpretat (el cervell) i executar aquestes decisions (els músculs). S'ha treballat molt per a dotar als robots de les mateixes capacitats. El resultat es mostra en la figura 3: en lloc dels ulls, Curiosity té cambres; en lloc del cervell, ordinadors; i en lloc dels músculs, té motors en les rodes. Per tant, tenim tots els elements necessaris per a tenir autonomia, però ara ens falta un pas més. Com es poden utilitzar aquests elements perquè el robot navega de manera autònoma?
Navegació autònoma
Estem davant una capacitat imprescindible. Si un robot no pot moure's per a explorar el seu entorn, ens servirà per a poc. La navegació autònoma es defineix com la capacitat de desplaçament d'un punt a un altre d'un mitjà, evitant obstacles. En el cas de Curiosity, el problema de la navegació es divideix en tres subbloques: interpretació de l'entorn, planificació del recorregut i estimació de la seva ubicació. Ho veurem un a un.
Interpretació de l'entorn
Atès que el nostre robot està situat en un entorn desconegut, és necessari detectar els objectes que li envolten i les característiques del sòl abans de realitzar qualsevol moviment. Si té una pedra davant, no hauria d'avançar perquè pot xocar amb la pedra. Per a evitar la pedra és imprescindible interpretar les dades que rep de l'entorn.
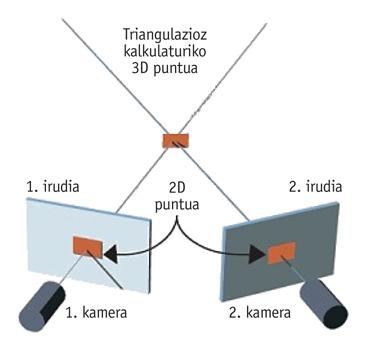
Per a això, Curiosity utilitza dues cambres i no és casualitat. Si l'ésser humà té visió en 3 dimensions, és perquè utilitzem en gran manera dos ulls. Com es pot observar en la figura 4, per als robots s'ha seguit el mateix model. La idea és senzilla. Totes dues cambres dibuixen dues imatges diferents del mateix entorn. Entre totes dues imatges hi ha un petit desplaçament, una diferència proporcional a la distància entre cambres. La separació d'un mateix punt en cada imatge permet calcular fàcilment, mitjançant triangulació, la posició d'aquest punt en el mitjà en 3 dimensions.
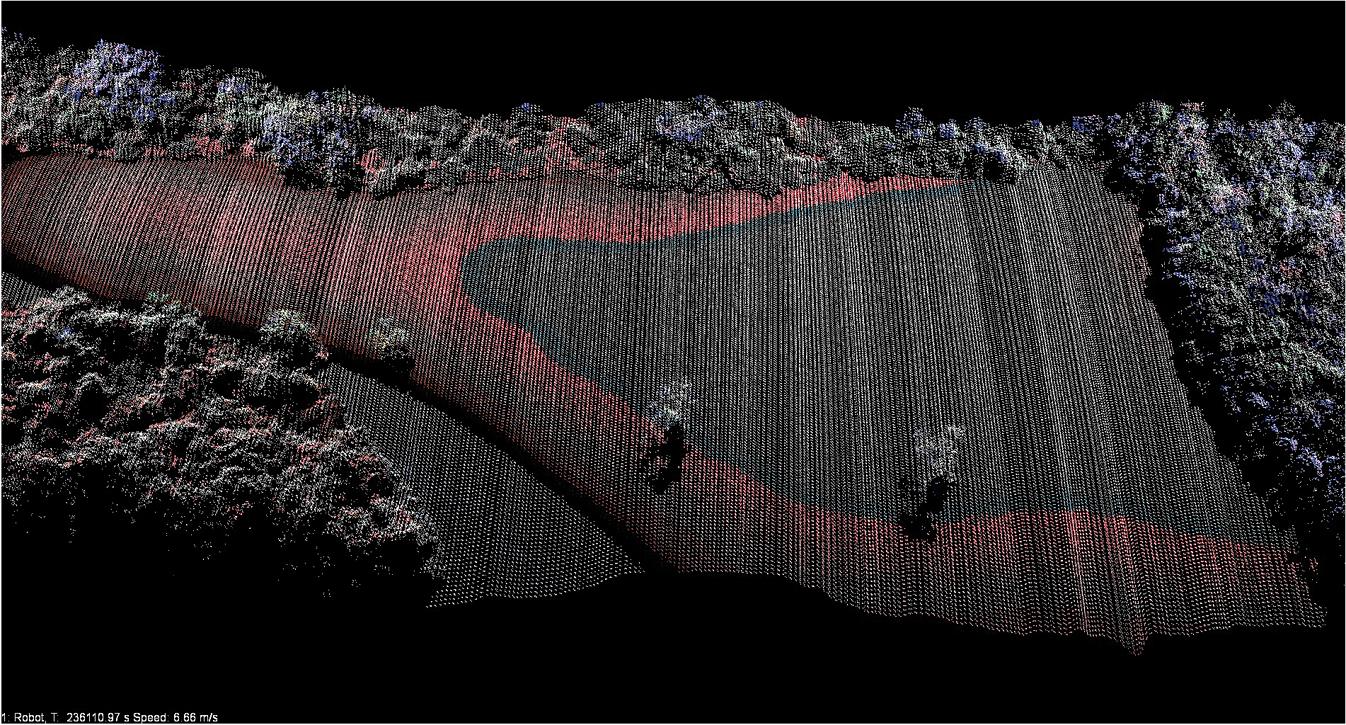
Si som capaços d'aparellar molts punts en totes dues imatges, podem obtenir un núvol de punts de l'entorn. Un núvol de punts és un conjunt de punts de 3 dimensions. A tall d'exemple, en la figura 5 es mostra un núvol de punts obtinguda en un bosc. Curiosity aconsegueix aquest tipus de núvols de punts en Mart i el seu treball consisteix a diferenciar les característiques del mitjà a través d'aquests núvols. Per exemple, llocs que no pot travessar, pendents, forats, etc. El resultat d'aquest procés és un mapa de navegació de l'entorn en el qual es distingeixen les zones navegables i les no navegables.
Planificació del recorregut
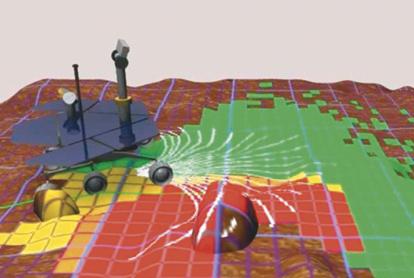
Igual que els dispositius GPS dels cotxes, Curiosity calcula la ruta més curta des del seu lloc fins al punt de destinació. Aquesta planificació es realitza sobre els mapes de navegació obtinguts mitjançant cambres, tal com es mostra en la figura 6. Per a això, té en compte totes les rutes que el robot pot executar. Si aquestes rutes entren en zones no navegables es descarten. Entre les rutes possibles es minimitza el nombre de moviments i se seleccionen les que es troben més allunyades de les barreres, utilitzant algorismes de cerca.
Estimació de localització
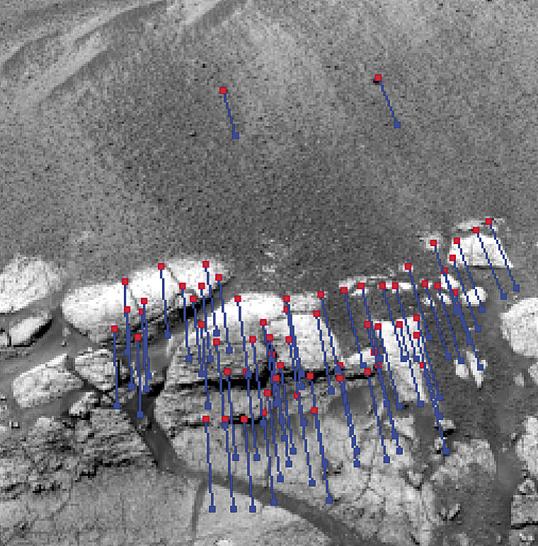
La navegació no és possible si no sabem on estem amb el nostre punt objectiu. Si ens manen avançar 10 metres pel lloc en el qual ens trobem, és imprescindible saber en tot moment quant hem desplaçat des del punt de partida i, per tant, on estem respecte a l'objectiu. La millor manera de mesurar aquests desplaçaments és mitjançant odometría visual. Una vegada més, mitjançant dues cambres se separa un munt de punts significatius de l'entorn i es calculen les seves coordenades en 3 dimensions. Quan arriba una nova imatge s'identifiquen els mateixos punts que en la imatge anterior i es mesura el seu desplaçament respecte a la imatge antiga. Així doncs, com aquest desplaçament és conseqüència del moviment del robot, es calcula el desplaçament real del robot. El resultat d'aquest procés es mostra en la figura 7.
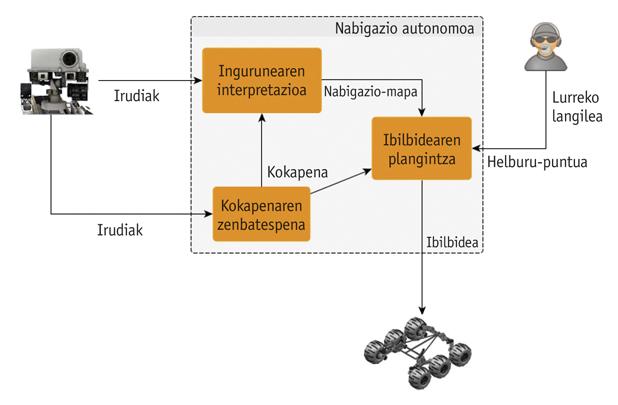
Combinant les tres capacitats descrites, Curiosity aconsegueix que Mart es mogui i que acudeixi a casaca a les zones ordenades pel personal de la Terra. La figura 8 mostra una descripció resumida del procés.
Futur
Hi ha en marxa grans projectes per a conèixer més a fons Mart. Potser el més atractiu és el Mars Sample Return 1. En concret, NASA i AQUESTA (Agència Espacial Europea) col·laboren per a enviar un nou robot a Mart i portar a la Terra les mostres que allí recull. Per a aquesta tasca el nou robot haurà de tenir un major grau d'autonomia.
La missió tindrà una durada determinada, ja que la devolució de l'envàs enviat a Mart és més difícil a mesura que transcorre el temps. Per això, el robot haurà de tenir la capacitat de realitzar mapes complets del seu entorn. Haurà de recordar els recorreguts que ha realitzat des del vaixell fins al punt de recollida de les mostres per a aconseguir una planificació més ràpida. Per a una millor navegació, haurà de conèixer les característiques del sòl a través de la vista: si és sorra o fang, per a evitar zones relliscoses, etc.
Tot això ja s'ha aconseguit en la Terra, per què no en Mart? La raó principal és que els ordinadors que s'envien a l'espai tenen les seves limitacions. A causa dels canvis de temperatura, radiació i consum energètic, els dos ordinadors de Curiosity tenen la capacitat dels ordinadors que estaven en les nostres llars fa 10 anys. I així és molt difícil aconseguir el nivell d'autonomia que necessiten.
En conseqüència, hi ha molt a fer en els ordinadors espacials i en l'eficiència dels algorismes. I es farà aquest treball. S'enviaran més robots tant al planeta vermell com a uns altres. Ells seran els nostres exploradors i antecedents. Perquè algun dia l'home arribarà a aquests fascinants mons més enllà de la Terra.
Bibliografia
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







