



Robic III: robot trepador para entornos peligrosos
La segunda semana de noviembre se celebró el seminario de Robótica Aplicada a la Industria Eléctrica en la sede del centro tecnológico CEIT de Donostia. Allí se presentó el robot móvil creado por el centro tecnológico CEIT dentro del proyecto SRT, patrocinado por las empresas Robic III, Iberdrola y Endesa. Este robot es capaz de ascender sobre superficies verticales gracias a un sistema de ventosas y está dotado de sensores y cámaras para encontrar grietas. Su primer cometido será inspeccionar los tubos y depósitos de residuos de las centrales nucleares en busca de grietas. Este proyecto nace para evitar el riesgo de radiación que sufren los trabajadores que realizan este tipo de trabajo en centrales nucleares.
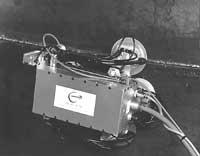
El robot, creado por los miembros chilenos del CEIT Leoncio Briones y Paul Bustamante, tiene como objetivo principal la inspección, operación y mantenimiento de plantas nucleares. Asimismo, en el diseño se ha buscado que el tamaño, peso y coste de operación del robot sean los mínimos posibles. En consecuencia, el robot trepador Robic III es rápido, compacto, barato y robusto, y se puede construir con elementos fácilmente localizables en el mercado. Junto con un sistema mecánico relativamente simple, se requiere un hardware y software de control más sofisticado, incluyendo videocámaras, sensores de vacío, electroválvulas y componentes electrónicos. En la figura 1 se muestra la carrocería de Robic III. En esta carrocería se encuentra el sistema locomotor por un lado y el sensor de ultrasonidos y cámaras de vídeo por otro.
Mecanismo de locomoción
En la unidad central del robot hay dos cilindros sin tallos de 100 mm de longitud y 10 mm de diámetro. Los conductores transversales que se deslizan por estos cilindros llevan dos copas de absorción a cada lado del robot. Las otras dos copas de absorción son fijas y se encuentran en la parte delantera y trasera del robot.
El robot funciona gracias a las copas de absorción móviles y fijas, que se describen a continuación:
- Se actúa sobre las copas fijas de absorción delantera y trasera del robot para que quede pegado en la pared.
- Las copas de absorción móviles se llevan hasta delante.
- Se afectan las copas de absorción móviles y se deja de accionar las de absorción fijas.
- Las copas de absorción móviles se retrasan hasta el tope del cilindro, generando el movimiento de avance del robot.
Las copas móviles de absorción tienen movimiento de rotación con respecto a las guías transversales. Esto puede implicar un movimiento rotacional y transversal del robot.
Sistema de vacío
En los prototipos previos a los robots trepadores el mayor problema era el elevado peso de generadores de vacío y cilindros neumáticos convencionales. Por tanto, para Robic III se decidió crear un sistema de generación de vacío más compacto y un nuevo subsistema de posicionamiento para reducir peso y volumen. Se puede observar que el generador de vacío tiene un eje de rotación que permite el movimiento del robot sobre superficies cilíndricas y esféricas.
Sistema de control

El sistema de control está formado por una tabla de control basada en el procesador Intel 89535. Aunque todas las electroválvulas son de tipo on-off, cada cilindro tiene un sensor de posición para controlar con precisión el movimiento del robot. Cada copa de absorción tiene un sensor de vacío cuyas medidas se utilizan para determinar si cada paso del algoritmo de control ha salido bien o no. Si un paso no ha salido del todo bien, se repite una serie de golpes cortos hasta conseguir el fallo adecuado. De esta forma se asegura el buen funcionamiento del robot durante las soldaduras e irregularidades. El robot se teleopera a través de un ordenador personal con diferentes cámaras y sensores.
El primer cometido del robot trepador Robic III será inspeccionar bajo radiación de 1.2 Gy/h un depósito que contenga el residuo radiactivo de la central nuclear de Santa María de Garoña. De esta forma se podrán inspeccionar los entornos en los que el personal no pueda llegar, tanto a través de sensores como de cámaras.
El proyecto SRT fue promovido por ENDESA e IBERDROLA en 1994 con el objetivo de crear sistemas robóticos de inspección y operación en centrales nucleares del Estado español.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian










