



Simulación de viaxes no proceso de deseño de convertidores de potencia
O uso da simulación por computador está amplamente estendido en diferentes ámbitos da ciencia e a tecnoloxía. En moitos casos, os sistemas a analizar adoitan ser moi complexos e é moi difícil obter solucións analíticas. Nestes casos, una das solucións é a simulación por computador.
Cando se desexa simular un sistema real, débense definir en primeiro lugar as ecuacións que describen o comportamento dinámico de devandito sistema. Estas ecuacións xeran un modelo de sistema no computador. Desta forma é posible analizar o funcionamento do sistema, modificando os valores das variables pódense facer predicións sobre o comportamento do sistema.
Os simulacros realízanse paso a paso. En cada paso de simulación resólvense ecuacións que describen o comportamento do sistema mediante algoritmos de integración (Euler, Runge-Kutta, etc.) aplícanse os resolutores baseados (solver , en inglés). Ademais, a cada paso de simulación correspóndelle un tempo de simulación. Este tempo indica si o sistema simulado pode estar tanto no mundo real como en ocasións. Paira determinar este tempo de simulación, o resolutor engade ao tempo de simulación do paso anterior un tempo determinado, denominado lonxitude do paso.
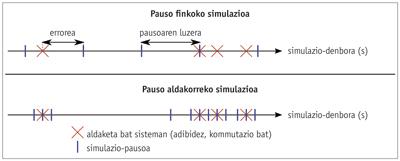
Basicamente, os resolutores pódense dividir en dous grandes grupos: os executados a paso fixo e os executados a paso variable. Dise que una simulación execútase a paso fixo cando a lonxitude do paso mantense fixa ao longo da simulación. Pola contra, en simulacións de paso variable, a lonxitude do paso varía en función da dinámica do sistema. Neste sentido, o paso de simulación acúrtase si nun determinado período de tempo o sistema cambia considerablemente, mellorando así a precisión da simulación. Con todo, en momentos de pouca variación, o paso alárgase. Paira determinar a lonxitude do paso, os resolutores de paso variable utilizan algoritmos especiais. Isto permite un control eficiente do número de pasos a realizar.
Simulando interruptores
Actualmente existen convertidores de potencia por todas as partes, como barcos, muíños de vento e vehículos eléctricos. Os convertidores de potencia utilízanse en sistemas de conversión de enerxía, cuxo obxectivo é a transformación de enerxía eléctrica de forma controlada. Neste sentido, a simulación por computador ten un importante papel nas primeiras partes do proceso de deseño destes convertidores, xa que permite analizar o comportamento do convertidor antes de construír o prototipo físico.
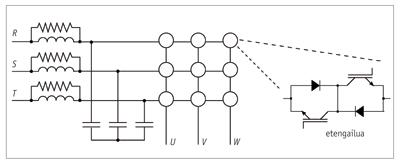
Normalmente, os convertidores de potencia están formados por interruptores (que se constrúen mediante dispositivos semiconductores) e a súa configuración permite a construción de diferentes topologías (rectificadores, convertidores matriciales, etc.). Considérase que os interruptores son controlados cando é posible controlar os momentos de activación ou desactivación dos mesmos. Así, mediante os algoritmos de control e modulación adecuados é posible controlar adecuadamente os momentos de activación e desactivación dos interruptores. Deste xeito, o convertidor pode sintetizar nas súas entradas e saídas referencias de tensión e corrente establecidas polo control.
Existen varias opcións de simulación de interruptores de convertidores de potencia. Por unha banda, pódense utilizar ecuacións que describan o comportamento dos dispositivos semiconductores, e doutra banda pódese considerar que os interruptores son ideais. O uso de modelos matemáticos específicos de dispositivos semiconductores é moi útil cando se trata, por exemplo, de analizar a eficiencia e as perdas do conversor. Con todo, a complexidade do modelo a simular aumenta considerablemente, polo que se tarda demasiado tempo en realizar simulacións. Pola contra, se o obxectivo é a análise do sistema de control do convertidor, basta con considerar que os interruptores son ideais, é dicir, que cando se acenden crean un curtocircuíto e cando se apagan quedan en circuíto aberto.
A simulación de sistemas conmutados, especialmente de convertidores de potencia, ten os seus retos. Por exemplo, se se utiliza un resolutor de paso fixo, está claro que os instantes de conmutación e os pasos de simulación dos interruptores non teñen por que ser sincronizados. Por iso, si un interruptor necesita activarse entre dous pasos de simulación, a simulación non ten en conta o efecto de devandita activación até o seguinte paso de simulación. Estes erros dan lugar á aparición de compoñentes armónicos de baixa frecuencia nas correntes e tensións sintetizadas polo convertidor. Estes compoñentes armónicos prodúcense como consecuencia do resolutor utilizado e non teñen que ver co comportamento real do convertidor. Este fenómeno denomínase jitter (é dicir, perturbacións irregulares). Con todo, o erro pode reducirse se se reduce a lonxitude do paso, a cambio a simulación retárdase considerablemente ao aumentar considerablemente o número de operacións a realizar. Con solucións de paso variable é posible compensar ao jitter sen moderar tanto a simulación.
Interpolación acompañante
Os algoritmos de control nos modernos convertidores de potencia son cada vez máis complexos. Ao mesmo tempo, as frecuencias de conmutación dos interruptores son en moitos casos moi altas (o convertidor matricial é un bo exemplo diso). Por iso, a pesar de utilizar resolutores con pasos variables, as simulacións seguen sendo moi lentas. En consecuencia, o número de simulacións que se poden levar a cabo no proceso de deseño en ausencia de solucións está moi limitado.
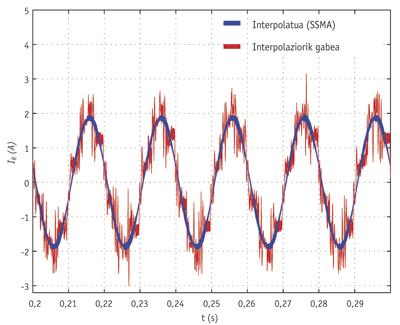
Nestes casos, a mellor solución é utilizar técnicas de interpolación. A interpolación permite aproximar o valor das variables nun punto entre dous pasos de simulación. Desta forma pódese aumentar a lonxitude do paso mantendo una boa precisión. Con todo, hai que buscar un compromiso entre a lonxitude e a precisión do paso, xa que canto máis longo sexa o paso, a simulación é máis rápida, pero á vez pérdese precisión. Existen varias técnicas de interpolación como TAM ( Time Averaging Method ), SSMA ( Switching State Matrix Averaging Method ) e a interpolación lineal. Por exemplo, a utilización da técnica de interpolación SSMA en lugar dun resolutor de paso variable paira simular o convertidor matricial permite aforrar un 95% de tempo na simulación.
Simulando en tempo real
Como xa se mencionou, nas primeiras fases do deseño dos convertidores de potencia e os seus controladores, o estándar de simulación por computador ten un papel moi importante. Doutra banda, existe outro tipo de simulación, denominada simulación en tempo real, moi útil paira as últimas fases do proceso de deseño.
Cando un determinado modelo execútase ao mesmo ritmo que o mundo real, dise que ese modelo se está simulando en tempo real. É dicir, cando se executa un paso de simulación, o tempo de simulación correspondente a devandito paso coincide co tempo transcorrido no mundo real desde o inicio da simulación.
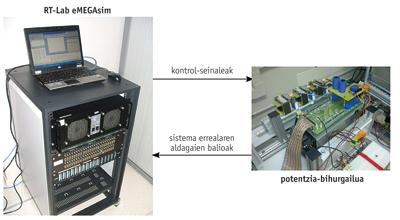
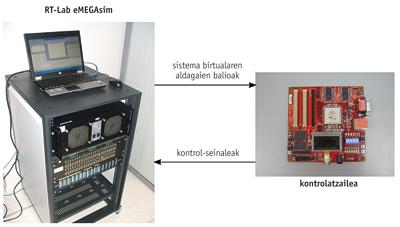
Paira poder simular en tempo real é necesario resolver as ecuacións a resolver en cada paso de simulación antes de comezar a executar o seguinte paso de simulación. A complexidade dos cálculos necesarios paira simular os convertidores de potencia fai necesario utilizar dispositivos especiais de alta capacidade de cálculo que permitan a súa simulación en tempo real. Desde o principio, utilizáronse DSPs e simuladores híbridos (con parte analóxica e dixital) paira simular sistemas de potencia en tempo real. Con todo, as tecnoloxías baseadas en microprocesadores tiveron moi boa acollida nos últimos anos. Exemplo diso son a supercomputadora Hypersim de Hydro Quebec e o simulador dixital en tempo real RT-Lab eMEGAsim de Opal-rat.
Basicamente, estes simuladores dixitais baseados en microprocesadores son grupos PC (cluster, en inglés). Estes sistemas utilizan una computación paralela que permite obter una capacidade de cálculo moi elevada. Nestes sistemas é obrigatorio o uso de resolutores de paso fixo, xa que os resolutores de paso variable non son deterministas (non se pode saber canto tempo tárdase en resolver cada paso). Por outra banda, a lonxitude mínima do paso está limitada por dous factores. Por unha banda, o paso debe ser o suficientemente longo como paira poder realizar todos os cálculos, e doutra banda debe ser maior que o atraso debido ás comunicacións entre microprocesadores. Por exemplo, na simulación en tempo real de moitos convertidores de potencia, a lonxitude mínima do paso en eMEGsim é de 10”, polo que a lonxitude do paso é relativamente grande, polo que é necesario utilizar técnicas de interpolación paira obter resultados concretos si deséxase simular os convertidores de potencia en tempo real.

Estes simuladores en tempo real dispoñen de entradas e saídas analóxicas e dixitais. Desta forma, o modelo simulado en tempo real pode comunicarse co mundo real. Así mesmo, o simulador deberá ser capaz de calcular os erros debidos á falta de sincronización entre os sinais de conmutación e os pasos de simulación que pode recibir das entradas dixitais, información necesaria paira a correcta execución dos algoritmos de interpolación. Ao mesmo tempo, é importante que o simulador poida enviar sinais de activación e desactivación de interruptores con gran precisión a través de saídas dixitais. Por exemplo, estas funcións pódense realizar utilizando dispositivos dixitais rápidos FPGA ( Field Programable Gate Array ). Estas características permiten realizar dúas modalidades de simulación en tempo real: control de prototipado rápido e simulación en tempo real Hardware in the Loop (HIL).
O control de prototipado rápido é una metodoloxía moi coñecida que foi utilizada durante varios anos no deseño de algoritmos de control de convertidores. En sistemas reais listos paira comercializar, o control se implementa nun dispositivo electrónico determinado. No control de prototipado rápido, pola contra, o control do sistema simúlase en tempo real no simulador dixital e o sistema que se desexa controlar, neste caso o convertidor, é real. O simulador dixital conéctase ao prototipo físico en bucle pechado. Desta forma, o simulador recolle os valores das variables a controlar do prototipo real e á vez envía ao conversor sinais de activación e desactivación de interruptores. Esta técnica permite superar a ponte existente entre a simulación e o mundo real, reducindo o proceso de deseño do convertidor e reducindo o tempo de comercialización.
Doutra banda, a simulación HIL en tempo real foi amplamente utilizada en automoción e aeronáutica. Con todo, a práctica en electrónica de potencia é relativamente nova. Nesta modalidade realízase xusto o contrario do que se fai no control de prototipado rápido, é dicir, simúlase o conversor, mentres que o controlador é real. Desta forma execútase en tempo real o modelo fiel do sistema que se quere controlar no simulador dixital, e contrólase mediante un controlador real. A simulación HIL en tempo real é de gran utilidade no proceso de deseño dos convertidores, xa que permite analizar o funcionamento do controlador físico en condicións de funcionamento normal e extremo do sistema sen pór en perigo ningún prototipo caro.
Como se puido comprobar neste artigo, a simulación é una excelente ferramenta de traballo paira o deseño de sistemas de potencia con diferentes posibilidades.
Bibliografía
Este traballo realizouse co apoio da Universidade do País Vasco/Euskal Herriko Unibertsitatea, o proxecto S-PE09UN08 SAIOTEK do Goberno Vasco e as subvencións (IT394-10) paira impulsar as actividades dos grupos de investigación do sistema universitario vasco do Departamento de Educación, Universidades e Investigación do Goberno Vasco.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







