



Simulación de viajes en el proceso de diseño de convertidores de potencia
El uso de la simulación por ordenador está ampliamente extendido en diferentes ámbitos de la ciencia y la tecnología. En muchos casos, los sistemas a analizar suelen ser muy complejos y es muy difícil obtener soluciones analíticas. En estos casos, una de las soluciones es la simulación por ordenador.
Cuando se desea simular un sistema real, se deben definir en primer lugar las ecuaciones que describen el comportamiento dinámico de dicho sistema. Estas ecuaciones generan un modelo de sistema en el ordenador. De esta forma es posible analizar el funcionamiento del sistema, modificando los valores de las variables se pueden hacer predicciones sobre el comportamiento del sistema.
Los simulacros se realizan paso a paso. En cada paso de simulación se resuelven ecuaciones que describen el comportamiento del sistema mediante algoritmos de integración (Euler, Runge-Kutta, etc.) se aplican los resolutores basados (solver , en inglés). Además, a cada paso de simulación le corresponde un tiempo de simulación. Este tiempo indica si el sistema simulado puede estar tanto en el mundo real como en ocasiones. Para determinar este tiempo de simulación, el resolutor añade al tiempo de simulación del paso anterior un tiempo determinado, denominado longitud del paso.
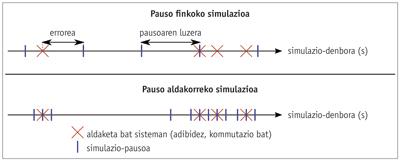
Básicamente, los resolutores se pueden dividir en dos grandes grupos: los ejecutados a paso fijo y los ejecutados a paso variable. Se dice que una simulación se ejecuta a paso fijo cuando la longitud del paso se mantiene fija a lo largo de la simulación. Por el contrario, en simulaciones de paso variable, la longitud del paso varía en función de la dinámica del sistema. En este sentido, el paso de simulación se acorta si en un determinado periodo de tiempo el sistema cambia considerablemente, mejorando así la precisión de la simulación. Sin embargo, en momentos de poca variación, el paso se alarga. Para determinar la longitud del paso, los resolutores de paso variable utilizan algoritmos especiales. Esto permite un control eficiente del número de pasos a realizar.
Simulando interruptores
Actualmente existen convertidores de potencia por doquier, como barcos, molinos de viento y vehículos eléctricos. Los convertidores de potencia se utilizan en sistemas de conversión de energía, cuyo objetivo es la transformación de energía eléctrica de forma controlada. En este sentido, la simulación por ordenador tiene un importante papel en las primeras partes del proceso de diseño de estos convertidores, ya que permite analizar el comportamiento del convertidor antes de construir el prototipo físico.
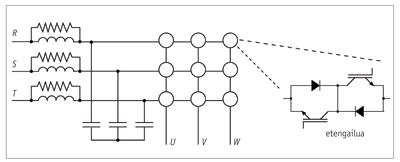
Normalmente, los convertidores de potencia están formados por interruptores (que se construyen mediante dispositivos semiconductores) y su configuración permite la construcción de diferentes topologías (rectificadores, convertidores matriciales, etc.). Se considera que los interruptores son controlados cuando es posible controlar los momentos de activación o desactivación de los mismos. Así, mediante los algoritmos de control y modulación adecuados es posible controlar adecuadamente los momentos de activación y desactivación de los interruptores. De este modo, el convertidor puede sintetizar en sus entradas y salidas referencias de tensión y corriente establecidas por el control.
Existen varias opciones de simulación de interruptores de convertidores de potencia. Por un lado, se pueden utilizar ecuaciones que describan el comportamiento de los dispositivos semiconductores, y por otro lado se puede considerar que los interruptores son ideales. El uso de modelos matemáticos específicos de dispositivos semiconductores es muy útil cuando se trata, por ejemplo, de analizar la eficiencia y las pérdidas del conversor. Sin embargo, la complejidad del modelo a simular aumenta considerablemente, por lo que se tarda demasiado tiempo en realizar simulaciones. Por el contrario, si el objetivo es el análisis del sistema de control del convertidor, basta con considerar que los interruptores son ideales, es decir, que cuando se encienden crean un cortocircuito y cuando se apagan quedan en circuito abierto.
La simulación de sistemas conmutados, especialmente de convertidores de potencia, tiene sus retos. Por ejemplo, si se utiliza un resolutor de paso fijo, está claro que los instantes de conmutación y los pasos de simulación de los interruptores no tienen por qué ser sincronizados. Por ello, si un interruptor necesita activarse entre dos pasos de simulación, la simulación no tiene en cuenta el efecto de dicha activación hasta el siguiente paso de simulación. Estos errores dan lugar a la aparición de componentes armónicos de baja frecuencia en las corrientes y tensiones sintetizadas por el convertidor. Estos componentes armónicos se producen como consecuencia del resolutor utilizado y no tienen que ver con el comportamiento real del convertidor. Este fenómeno se denomina jitter (es decir, perturbaciones irregulares). Sin embargo, el error puede reducirse si se reduce la longitud del paso, a cambio la simulación se ralentiza considerablemente al aumentar considerablemente el número de operaciones a realizar. Con soluciones de paso variable es posible compensar al jitter sin moderar tanto la simulación.
Interpolación acompañante
Los algoritmos de control en los modernos convertidores de potencia son cada vez más complejos. Al mismo tiempo, las frecuencias de conmutación de los interruptores son en muchos casos muy altas (el convertidor matricial es un buen ejemplo de ello). Por ello, a pesar de utilizar resolutores con pasos variables, las simulaciones siguen siendo muy lentas. En consecuencia, el número de simulaciones que se pueden llevar a cabo en el proceso de diseño en ausencia de soluciones está muy limitado.
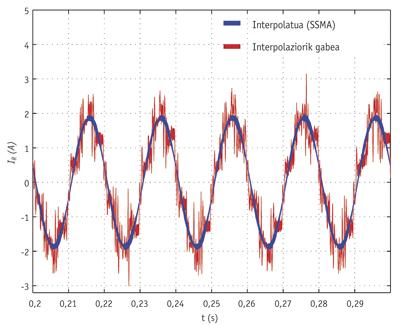
En estos casos, la mejor solución es utilizar técnicas de interpolación. La interpolación permite aproximar el valor de las variables en un punto entre dos pasos de simulación. De esta forma se puede aumentar la longitud del paso manteniendo una buena precisión. Sin embargo, hay que buscar un compromiso entre la longitud y la precisión del paso, ya que cuanto más largo sea el paso, la simulación es más rápida, pero a la vez se pierde precisión. Existen varias técnicas de interpolación como TAM ( Time Averaging Method ), SSMA ( Switching State Matrix Averaging Method ) y la interpolación lineal. Por ejemplo, la utilización de la técnica de interpolación SSMA en lugar de un resolutor de paso variable para simular el convertidor matricial permite ahorrar un 95% de tiempo en la simulación.
Simulando en tiempo real
Como ya se ha mencionado, en las primeras fases del diseño de los convertidores de potencia y sus controladores, el estándar de simulación por ordenador tiene un papel muy importante. Por otro lado, existe otro tipo de simulación, denominada simulación en tiempo real, muy útil para las últimas fases del proceso de diseño.
Cuando un determinado modelo se ejecuta al mismo ritmo que el mundo real, se dice que ese modelo se está simulando en tiempo real. Es decir, cuando se ejecuta un paso de simulación, el tiempo de simulación correspondiente a dicho paso coincide con el tiempo transcurrido en el mundo real desde el inicio de la simulación.
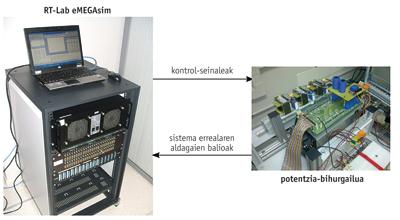
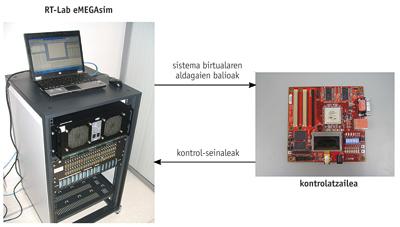
Para poder simular en tiempo real es necesario resolver las ecuaciones a resolver en cada paso de simulación antes de comenzar a ejecutar el siguiente paso de simulación. La complejidad de los cálculos necesarios para simular los convertidores de potencia hace necesario utilizar dispositivos especiales de alta capacidad de cálculo que permitan su simulación en tiempo real. Desde el principio, se han utilizado DSPs y simuladores híbridos (con parte analógica y digital) para simular sistemas de potencia en tiempo real. Sin embargo, las tecnologías basadas en microprocesadores han tenido muy buena acogida en los últimos años. Ejemplo de ello son la supercomputadora Hypersim de Hydro Quebec y el simulador digital en tiempo real RT-Lab eMEGAsim de Opal-rat.
Básicamente, estos simuladores digitales basados en microprocesadores son grupos PC (cluster, en inglés). Estos sistemas utilizan una computación paralela que permite obtener una capacidad de cálculo muy elevada. En estos sistemas es obligatorio el uso de resolutores de paso fijo, ya que los resolutores de paso variable no son deterministas (no se puede saber cuánto tiempo se tarda en resolver cada paso). Por otra parte, la longitud mínima del paso está limitada por dos factores. Por un lado, el paso debe ser lo suficientemente largo como para poder realizar todos los cálculos, y por otro lado debe ser mayor que el retraso debido a las comunicaciones entre microprocesadores. Por ejemplo, en la simulación en tiempo real de muchos convertidores de potencia, la longitud mínima del paso en eMEGsim es de 10”, por lo que la longitud del paso es relativamente grande, por lo que es necesario utilizar técnicas de interpolación para obtener resultados concretos si se desea simular los convertidores de potencia en tiempo real.

Estos simuladores en tiempo real disponen de entradas y salidas analógicas y digitales. De esta forma, el modelo simulado en tiempo real puede comunicarse con el mundo real. Asimismo, el simulador deberá ser capaz de calcular los errores debidos a la falta de sincronización entre las señales de conmutación y los pasos de simulación que puede recibir de las entradas digitales, información necesaria para la correcta ejecución de los algoritmos de interpolación. Al mismo tiempo, es importante que el simulador pueda enviar señales de activación y desactivación de interruptores con gran precisión a través de salidas digitales. Por ejemplo, estas funciones se pueden realizar utilizando dispositivos digitales rápidos FPGA ( Field Programable Gate Array ). Estas características permiten realizar dos modalidades de simulación en tiempo real: control de prototipado rápido y simulación en tiempo real Hardware in the Loop (HIL).
El control de prototipado rápido es una metodología muy conocida que ha sido utilizada durante varios años en el diseño de algoritmos de control de convertidores. En sistemas reales listos para comercializar, el control se implementa en un dispositivo electrónico determinado. En el control de prototipado rápido, por el contrario, el control del sistema se simula en tiempo real en el simulador digital y el sistema que se desea controlar, en este caso el convertidor, es real. El simulador digital se conecta al prototipo físico en bucle cerrado. De esta forma, el simulador recoge los valores de las variables a controlar del prototipo real y a la vez envía al conversor señales de activación y desactivación de interruptores. Esta técnica permite superar el puente existente entre la simulación y el mundo real, reduciendo el proceso de diseño del convertidor y reduciendo el tiempo de comercialización.
Por otro lado, la simulación HIL en tiempo real ha sido ampliamente utilizada en automoción y aeronáutica. Sin embargo, la práctica en electrónica de potencia es relativamente nueva. En esta modalidad se realiza justo lo contrario de lo que se hace en el control de prototipado rápido, es decir, se simula el conversor, mientras que el controlador es real. De esta forma se ejecuta en tiempo real el modelo fiel del sistema que se quiere controlar en el simulador digital, y se controla mediante un controlador real. La simulación HIL en tiempo real es de gran utilidad en el proceso de diseño de los convertidores, ya que permite analizar el funcionamiento del controlador físico en condiciones de funcionamiento normal y extremo del sistema sin poner en peligro ningún prototipo caro.
Como se ha podido comprobar en este artículo, la simulación es una excelente herramienta de trabajo para el diseño de sistemas de potencia con diferentes posibilidades.
Bibliografía
Este trabajo se ha realizado con el apoyo de la Universidad del País Vasco/Euskal Herriko Unibertsitatea, el proyecto S-PE09UN08 SAIOTEK del Gobierno Vasco y las subvenciones (IT394-10) para impulsar las actividades de los grupos de investigación del sistema universitario vasco del Departamento de Educación, Universidades e Investigación del Gobierno Vasco.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







