



Robot souterrain
Les rues de nos villages se lèvent chaque année avec des marteaux pneumatiques bruyants pour installer des pipelines, améliorer le réseau d'approvisionnement en eau ou réparer des câbles de téléphonie et d'électricité. Pour cela, il ya des tranchées dans lesquelles les municipalités dépensent beaucoup d'argent. En outre, les magasins adjacents au fossé sont moins fréquentés, les gens ne peuvent pas être calmes sur le trottoir et à la fin il est très coûteux de fermer le fossé et de mettre la rue dans son état antérieur. Il faut également tenir compte des accidents qui se produisent avec ces tranchées.
Cette situation est très améliorée avec des robots souterrains. Et c'est que ces machines réalisent parfaitement tous ces travaux et réparations sans ouvrir aucun type de tranchée. Ce type de robots sont utilisés non seulement au Japon, mais surtout en Grande-Bretagne, en Allemagne et en Scandinavie. En France, il a été récemment utilisé dans la région de Paris. En fait, grâce au système conventionnel, la durée d'une semaine de travail est réduite à un jour en utilisant ces robots type topo.
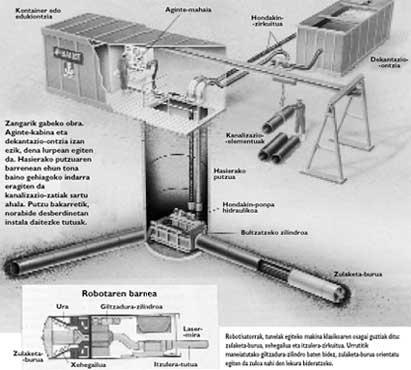
Ces robots souterrains sont une sorte de miniature de machines pour construire de grands tunnels. Ils portent radar et caméra ou gyroscope pour les guider par le haut. Ces robots nécessitent essentiellement deux puits: l'un au début de l'œuvre pour placer le robot et l'autre à la fin pour sortir à la fin du travail.
La machine entre dans le puits initial et est orientée dans la direction de la ligne. Il est ensuite placé sur un support et poussé par des cylindres capables de générer une force allant jusqu'à cent tonnes. La tête de forage est choisie en fonction des caractéristiques du terrain et tourne autour du sol ouvre sa place comme une taupe. Entre le puits initial et la tête de coupe, on fait passer de l'eau à haute pression. L'eau, dans le circuit de retour, entraîne les fragments levés jusqu'au récipient de décantation situé au sommet.

Parfois, surtout quand il ya un sol mou, le système projette l'argile liquide sous pression pour éviter la chute du sol en passant la tête de forage. Les cylindres qui poussent la tête vers l'avant ont généralement un parcours de deux mètres. Quand ils avancent cette distance sont ramassés en arrière et à l'appui est placé une pièce de deux mètres de longueur. Ensuite, la tête de perçage tourne à nouveau et les cylindres commencent à pousser.
Pour fixer l'axe du tunnel que l'on entend réaliser, dans le puits initial, un faisceau laser frappe la vue située à l'arrière de la machine. Toutes les informations sont envoyées directement au poste de l'extérieur du pilote afin que le conducteur, si nécessaire, change la direction de forage. Pour cela, vous devez manipuler à votre poste les cylindres situés dans l'articulation de la tête de perçage.
Le robot est capable d'ouvrir le trou correctement, mais quand vous effectuez un parcours courbe, il a plus d'obstacles et il n'est pas si précis sur de longues lignes courbes de télédétection laser. Pour surmonter cette difficulté, la société japonaise NTT utilise dans son centre pilote de Tsukuba un gyroscope à fibre optique pour guider ces robots ou butées automatiques. Il est monté sur la perceuse et dans n'importe quelle courbe il peut y avoir une erreur maximale de soixante ou un second degré, c'est-à-dire une erreur de 4 centimètres sur un chemin de cent mètres.
Cependant, ce type de robots, en plus d'installer de nouveaux orifices et tuyaux, doit prolonger les lignes et canalisations souterraines précédemment réalisées ou revoir celles existantes. Dans n'importe quelle ville, par exemple, il y a des kilomètres de réseau d'approvisionnement en eau pour étudier et renouveler, mais travailler sans ouvrir des tranchées n'est pas si facile. Ce système permet de réparer la canalisation de 150 mètres de fonte oxydée au début et à la fin sans faire plus qu'un trou. Pour cela, deux machines spéciales sont utilisées avec un bouclier situé au-dessus.
Le premier a des lames en acier flexible qui déchire l'intérieur du tube. Une fois nettoyé la surface interne du tube, une autre machine pneumatique connectée à un mélangeur de ciment projette le ciment sur toute la surface du tube. Enfin, une pièce conique finesse toute la surface intérieure du tube après la machine pneumatique.
Si la partie oxydée est la partie extérieure du tube, le problème est généralement plus grave, car il est nécessaire de remplacer l'ensemble du tube. Le seul système pour remplacer le tube sans ouvrir les tranchées est de diviser en interne par un piston tranchant et de compresser les morceaux sur elle.
Sans intelligence artificielle, ces robots/taupe ne savent pas éviter les obstacles. Dans le cas où l'exécution d'un tronçon de canalisation ou de ligne est nécessaire, d'autres installations ou barrières préétablies peuvent exister au même emplacement. Beaucoup de ces installations ou barrières peuvent être sur les plans des services techniques de la mairie, mais il y a aussi beaucoup d'imprévues et tout peut apparaître sous terre. En Grande-Bretagne et au Japon, ils utilisent un radar d'impulsions sur la rue pour détecter l'enterrement.
Le radar se fait passer lentement sur la partie à étudier et analyse les signaux reflétés dans le sol. Chaque fois qu'il y a un changement structurel dans le sous-sol, le profil des signaux réfléchis indique que le tube se trouve à une certaine profondeur. Dans la première révision on détecte entre 60% et 80% des canalisations, mais ensuite on passe encore et encore par le même chemin en détectant différentes profondeurs. (Pour cela il faut changer la fréquence de l'onde émise pendant la période). Cela permet de connaître 95% ou plus des objets souterrains.
La détection des conduites et des câbles est une chose, mais la structure du terrain elle-même peut également être modifiée. Si la tête de forage dans le sous-sol formé par des sables trouvait du calcaire, les dents seraient endommagées. C'est pourquoi, pour étudier la structure souterraine, on utilise des rayons gamma et avec l'aide de sondes on connaît la densité électronique des matériaux. Le rayonnement des neutrons est également utilisé pour mesurer la quantité d'eau souterraine. En outre, la sonde à neutrons semble servir à détecter les fuites dans les conduites d'eau et à profiter du gaspillage d'eau dans les villes en panne.
Cependant, il est clair qu'à l'avenir dans les rues vont considérablement réduire les marteaux pneumatiques et les fossés qui nous dérange maintenant.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







