Robot subterráneo
Las calles de nuestros pueblos se levantan cada año con ruidosos martillos neumáticos para instalar tuberías, mejorar la red de abastecimiento de agua o reparar cables de telefonía y electricidad. Para ello se realizan zanjas en las que los ayuntamientos gastan mucho dinero. Además, las tiendas contiguas a la zanja son menos frecuentadas, la gente no puede estar tranquila en la acera y al final es muy costoso cerrar la zanja y poner la calle en su estado anterior. También hay que tener en cuenta los accidentes que se producen con estas zanjas.
Esta situación es muy mejorable con robots subterráneos. Y es que estas máquinas realizan perfectamente todos estos trabajos y reparaciones sin abrir ningún tipo de zanja. Este tipo de robots se utilizan ya no sólo en Japón, sino sobre todo en Gran Bretaña, Alemania y Escandinavia. En Francia se ha empezado a usar recientemente en la zona de París. En realidad, mediante el sistema convencional, la duración de una semana de obra se reduce a un día utilizando estos robots tipo topo.
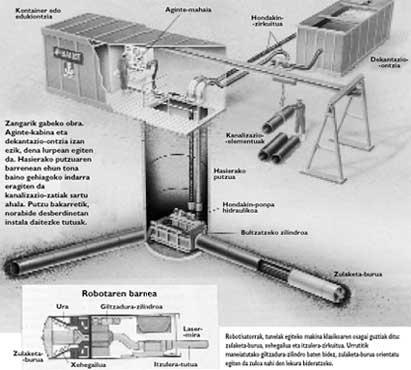
Estos robots subterráneos son una especie de miniatura de máquinas para construir grandes túneles. Llevan radar y cámara o giróscopo para que los guíen desde arriba. Estos robots requieren básicamente dos pozos: uno al inicio de la obra para colocar el robot y otro al final para salir al final del trabajo.
La máquina entra en el pozo inicial y se orienta en la dirección de la línea. Luego lo colocan en un soporte y lo empujan unos cilindros capaces de generar una fuerza de hasta cien toneladas. La cabeza de perforación se elige en función de las características del terreno y gira girando por el suelo abre su hueco como si fuera un topo. A su vez, entre el pozo inicial y el cabezal de corte se hace pasar agua a alta presión. El agua, en el circuito de retorno, arrastra los fragmentos levantados hasta el recipiente de decantación situado en la parte superior.

A veces, sobre todo cuando hay suelo blando, el sistema proyecta la arcilla líquida a presión para evitar la caída del suelo al pasar la cabeza de perforación. Los cilindros que impulsan la cabeza hacia delante suelen tener un recorrido de dos metros. Cuando adelantan esta distancia se recogen hacia atrás y en el apoyo se coloca una pieza de dos metros de longitud. A continuación, la cabeza de perforación vuelve a girar y los cilindros comienzan a empujar.
Para fijar el eje del túnel que se pretende realizar, en el pozo inicial, un rayo láser golpea la mira situada en la parte trasera de la máquina. Toda la información es enviada directamente al puesto desde el exterior del piloto para que el conductor, si fuera necesario, cambie la dirección de perforación. Para ello deberá manejar desde su puesto los cilindros situados en la articulación de la cabeza de perforación.
El robot es capaz de abrir el agujero correctamente, pero cuando va a realizar un recorrido curvo tiene más obstáculos y no es tan preciso en líneas curvas largas de telegetación láser. Para superar esta dificultad, la empresa japonesa NTT utiliza en su centro piloto de Tsukuba un giróscopo de fibra óptica para guiar estos robots o topes automáticos. Lleva montado en la taladro y en cualquier curva puede haber un error máximo de sesenta o un segundo de grado, es decir, un error de 4 centímetros en un camino de cien metros.
No obstante, este tipo de robots, además de instalar nuevos orificios y tuberías, deberá prolongar las líneas y canalizaciones subterráneas realizadas anteriormente o revisar las existentes. En cualquier ciudad, por ejemplo, hay kilómetros de la red de abastecimiento de agua para estudiar y renovar, pero trabajar sin abrir zanjas no es tan fácil. Mediante este sistema se puede reparar la canalización de 150 metros de fundición oxidada al principio y al final sin hacer más que un agujero. Para ello se utilizan dos máquinas especiales tiradas con un escudo situado arriba.
El primero tiene unas cuchillas de acero flexible que rasca el interior del tubo. Una vez limpia la superficie interna del tubo, otra máquina neumática conectada a un mezclador de cemento proyecta el cemento en toda la superficie del tubo. Finalmente, una pieza cónica finura toda la superficie interior del tubo tras la máquina neumática.
Si la parte oxidada es la parte exterior del tubo, el problema suele ser más grave, ya que es necesario sustituir todo el tubo. El único sistema para sustituir el tubo sin abrir zanjas es dividir internamente por un pistón cortante y comprimir los trozos en él.
Al no tener inteligencia artificial, estos robots/topo no saben evitar obstáculos. En el caso de que sea necesaria la ejecución de un tramo de canalización o línea, podrán existir otras instalaciones o barreras preestablecidas en el mismo emplazamiento. Muchas de estas instalaciones o barreras pueden estar en los planos de los servicios técnicos del Ayuntamiento, pero también son muchas las imprevistas y cualquier cosa puede aparecer bajo tierra. En Gran Bretaña y Japón utilizan un radar de pulsos sobre la calle para detectar el enterrado.
El radar se hace pasar lentamente sobre la parte que se desea investigar y analiza las señales reflejadas en el suelo. Cada vez que hay un cambio estructural en el subsuelo, el perfil de las señales reflejadas indica que el tubo se encuentra a cierta profundidad. En el primer repaso se detectan entre el 60% y el 80% de las canalizaciones, pero luego se pasa una y otra vez por el mismo camino detectando diferentes profundidades. (Para ello hay que cambiar la frecuencia de la onda emitida durante el periodo). Esto permite conocer el 95% o más de los objetos subterráneos.
La detección de tuberías y cables es una cosa, pero la propia estructura del terreno también puede sufrir modificaciones. Si el cabezal de perforación en el subsuelo formado por arenas encontrara caliza, los dientes se estropearían. Por ello, para estudiar la estructura subterránea se utilizan rayos gamma y con la ayuda de unas sondas se conoce la densidad electrónica de los materiales. La irradiación de neutrones también se utiliza para medir la cantidad de agua subterránea. Además, la sonda de neutrones parece servir para detectar fugas en las conducciones de agua y aprovechar el desperdicio de agua en las ciudades por averías.
Sin embargo, está claro que en el futuro en las calles se van a reducir considerablemente los martillos neumáticos y las zanjas que ahora nos molesta.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian