



Mecanismes d'alimentació de la premsa d'embutición i la seva simulació mecatrònica
El procés es desenvolupa de manera progressiva, utilitzant per a això cues de premsa. En les premses inicials es realitzen embuticiones profundes i en les últimes operacions de tall i acabat. Els sistemes de transport de peces d'una premsa a una altra han anat variant al llarg del temps, des del treball inicial que realitzaven els operaris, passant posteriorment per sistemes automatitzats, deixant a un costat al personal. L'últim pas en aquest desenvolupament és la premsa transfer. Podem dir que Transfer és una premsa única que realitza un embotit progressiu en diversos passos, utilitzant el mecanisme transfer per a transportar les peces d'un pas a un altre.
Aquest tipus de premses dobleguen almenys la productivitat. En conseqüència, el mecanisme transfer ha de moure els pesos pesants de manera ràpida i precisa. Aquestes funcions es poden realitzar mitjançant transfer mecànics o elèctrics.
Transfer mecànic
El motor elèctric de les premses mecàniques està unit a una roda d'alta inèrcia que, sense tot just variar la seva velocitat, aporta energia en els moments que necessita. Per les seves dimensions, el motor i la roda se situen en la part superior de la premsa. D'altra banda, per a facilitar la sintonització del sistema d'alimentació amb el moviment de carros de la premsa i dur a terme les mesures de seguretat, el mecanisme transfer es connecta a l'embragatge de fre utilitzat per a subministrar energia a la roda d'inèrcia. D'aquesta forma es pot aprofitar l'energia de la roda i no es necessita un altre motor.

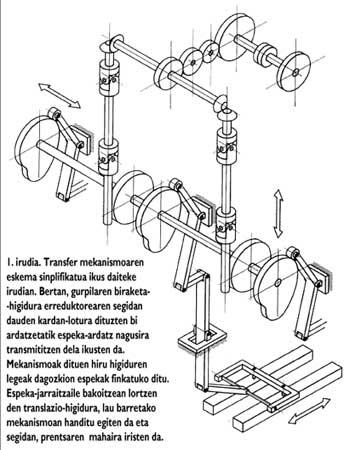
En la figura 1 es pot veure l'esquema simplificat del mecanisme transfer. En ell s'observa que el moviment de gir de la roda es transmet des dels dos eixos que estan units pel cardenal a continuació del reductor a l'eix principal de lleves. La llei de tres moviments (avanci/enrere, a dalt/a baix i zabadu/tancat) que conté el mecanisme fixarà les lleves corresponents. El moviment de translació que s'aconsegueix en cada espumante augmenta en el mecanisme de les quatre barres i a continuació arriba a la taula de la premsa.
Per a complir les toleràncies de productivitat i fabricació requerides pel mercat, els moviments del mecanisme transfer han de ser molt ràpids i precisos. Aquestes característiques vénen definides principalment pel perfil de la lleva: l'entrada i sortida han de ser llises i els moviments d'alta velocitat. En la majoria dels casos, a causa de la gran altura de les premses, la flexibilitat i el petit joc són difícils de mantenir. En conseqüència, els moviments que s'obtenen produeixen vibren en detriment de les toleràncies de fabricació. Encara que les vibracions són conseqüència de les complexes funcions de la velocitat, presenten una tendència dominant de creixement associat a la velocitat, limitant la productivitat de tota la màquina.
L'ús del transfer electrònic s'està estenent amb la intenció de fer front a tots aquests inconvenients.
Transfer electrònic
El principal avantatge d'aquesta opció radica en la simplificació del mecanisme i en la seva flexibilitat de fabricació.
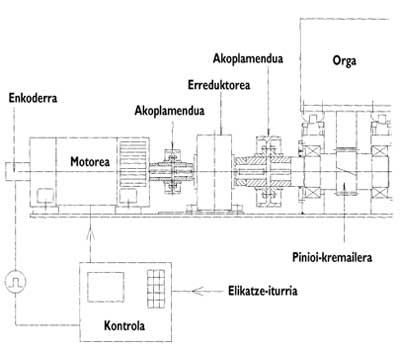
El mal aspecte es troba en la complexitat del motor electrònic. Tal com es pot observar en la figura 2, s'utilitzarà l'altre motor elèctric al voltant de la taula de la premsa. Per tant, la longitud del mecanisme, i per tant la flexibilitat i els jocs, es redueixen considerablement. Les lleves i els mecanismes de les quatre barres desapareixen i la seva funció es regirà per la regulació electrònica del motor. Els components que apareixen ara després del reductor són l'acoblament flexible i la cremallera i el pinyó.
No obstant això, el transfer electrònic, a més de problemes de control, també presenta problemes de sincronisme i seguretat.
Simulació mecatrònica

Com s'ha comentat anteriorment, el comportament del mecanisme d'alimentació és determinant per al correcte funcionament de la premsa transfer. D'altra banda, aquests sistemes s'adapten a les necessitats del client, exigint un disseny “ad hoc” i tenint en compte l'alt cost de la premsa transfer, qualsevol fallada té un gran impacte econòmic.
Per això, en el desenvolupament de nous dissenys predomina la idoneïtat i necessitat de la simulació. No obstant això, la seva utilitat pot estendre's a la detecció de problemes i a la confirmació prèvia de millores en els productes realitzats.
Els simulacres es basen en models. Per al desenvolupament de models propis de les àrees de Mecànica, Electrònica i Hidràulica, des de fa temps existeixen tècniques especialitzades. No obstant això, si es vol simular un comportament de detall en un model d'una àrea d'aquest tipus, o si es vol dur a terme un model de sistema de components de diferents àrees, és a dir, el desenvolupament de models mecatrónicos, es converteix en un problema.
El mètode de desenvolupament dels models Bond Graph permet superar aquests problemes. La formulació d'aquest model es basa en l'intercanvi d'energia, per la qual cosa per a qualsevol àmbit s'utilitza el mateix “llenguatge”. D'altra banda, la representació gràfica del model ofereix a experts en diferents àmbits la possibilitat de comprendre-ho de manera instantània i de realitzar propostes de canvi tangibles. A més, el programari disponible en el mercat, després de comprovar que el model Bond Graph és correcte, generen automàticament equacions que indiquen el comportament dinàmic del sistema i, en definitiva, s'integren per a dur a terme la simulació.

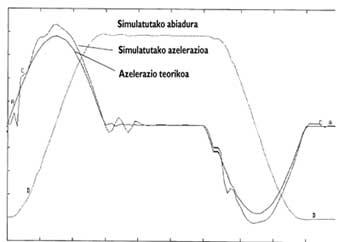
Un exemple es pot veure en la figura 3. Aquest exemple correspon al model de transfer mecànic i s'ha tingut en compte els contactes de lleves, les flexibilitats i els jocs. Comparant amb l'acceleració mesurada, s'evidencia la qualitat del model.
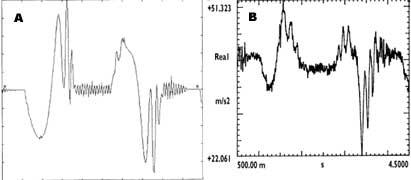
En transfer electrònic, després d'alinear el model Bond Graph al voltant del punt d'equilibri, altres eines disponibles per al Disseny de Control (Matlab, Matrix-x, etc.) s'utilitzen per a sintonitzar els paràmetres del control. A continuació es podran introduir els paràmetres fixats en el model Bond Graph i obtenir simulacions concretes de tot el sistema. Les conclusions d'aquest procés es poden veure en la figura 4. S'ha realitzat per a un transfer electrònic i s'han simulat desplaçaments i acceleracions simulant flexibilitats, jocs i control simultàniament.
Conclusions

Existeixen en l'actualitat models que permeten la realització de productes complexos i/o mecatrónicos “bé i a la primera”, així com mètodes per al seu desenvolupament i mètodes per a dur-los a terme. Les simulacions transfer indicades han posat de manifest la força del mètode de desenvolupament del model Bond Graph en aquesta mena de sistemes.
L'autor de premsa FAGOR ARRASATE ha adoptat aquests mètodes de simulació de la mà d'IKERLAN, gràcies al projecte europeu OLMECO impulsat per la Unió Europea i al projecte “Simulació de Sistemes Mecatrónicos en Màquina Eina”, cofinançat per CICYT i el Govern Basc.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







