Images pour la médecine
Vicomtech-IK4 est dédié au traitement de l'imagerie médicale pour le développement d'applications qui aident les médecins dans le diagnostic et la planification des opérations.
Ça ressemble à une salle d'opération, mais c'est un laboratoire. Même ceux qui portent une blouse blanche ne sont pas des chirurgiens, mais des ingénieurs et des informaticiens. Nous sommes situés dans le centre de recherche Vicomtech-IK4, un département dédié au développement d'applications dans le domaine de la santé.
Ils traitent de l'analyse, du traitement et de la visualisation des images médicales, principalement pour les hôpitaux et les fournisseurs d'hôpitaux.
SHABS RAJASEKHARAN Vicomtech-IK4 : Nous travaillons principalement pour les entreprises. Par exemple, pour les fournisseurs de machines pour les hôpitaux. Parce qu'ils veulent ajouter de la valeur à ces machines, ou utiliser un logiciel intelligent... Nous fabriquons surtout le logiciel.
Ce microscope est en cours de développement d'un logiciel de contrôle sur Internet. Le principal défi est de transmettre des images en haute résolution sans perte de qualité.
Jon Rock Legrain. Vicomtech-IK4 : Dans de nombreux cas, il arrive qu'il n'y ait pas d'experts ou de professionnels dûment formés pour interpréter cette image dans une zone géographique et que l'image doive être envoyée ailleurs. Grâce à ce logiciel, l'expert qui se trouve ailleurs pourrait contrôler le microscope afin qu'il puisse aller au point qui l'intéresse et voir l'image en temps réel.
Cet autre logiciel permet de visualiser les images médicales de manière intuitive. Dans ce cas, nous examinons le thorax et l'abdomen d'un patient à l'aide d'images tomographiques. Ce que vous voyez en haut à gauche est l'image prise par le TC d'en haut. Ce programme affiche le même point du corps sur le côté et devant, et peut également créer une quatrième vue plus complexe.
Jon Rock Legrain. Vicomtech-IK4 : Dans la vue coronale, il est très difficile de voir la colonne vertébrale intacte. Par conséquent, à travers un processus logiciel, nous traçons une ligne et créons une vue qui suit cette ligne. D'une certaine manière, cette ligne est corrigée et nous pouvons atteindre la moelle épinière complète.
La visualisation des images de cette manière est utile pour les diagnostics, ainsi que pour la planification d'une opération. C'est sur cette idée que repose la chirurgie guidée par image: le chirurgien utilise les images pré-extraites du patient comme une carte.
Pour savoir où il se trouve sur cette carte, certains points sont marqués à l'aide d'un poinçon avec des capteurs sur le corps du patient. C'est-à-dire que le corps reçoit une série de coordonnées pour unifier l'image et la réalité.
Aujourd'hui, les images sont affichées sur les moniteurs de la salle de sport, mais à l'avenir, elles veulent profiter de la réalité augmentée.
Jon Rock Legrain. Vicomtech-IK4 : Au lieu de le voir sur les moniteurs, le chirurgien pourrait le voir dans les oculaires du microscope intraopératoire, superposé sur l'image prise par le microscope, où se trouve le cercle de Willies, ou voir les artères, les veines... avec un contraste différent et une couleur différente, pour une aide visuelle différente.
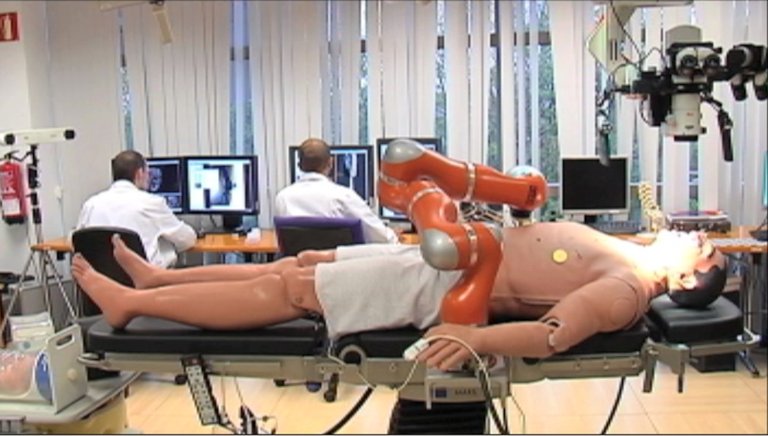
Cependant, l'acquisition d'images médicales à travailler sur des projets n'est pas facile, c'est pourquoi elles sont créées dans le laboratoire lui-même. Ils ont pour cela des phantomes couramment utilisés dans les facultés pour former les médecins: un arbre bronchique pour les endoscopies, une poupée représentant un fœtus de 21 semaines, et Patxi, un patient imaginaire.
Ce qui se déplace sur Patxi est un bras robotisé couramment utilisé dans l'automobile. Comme la plupart des robots chirurgicaux, il peut être contrôlé à distance et programmé plusieurs ordres pour fonctionner de manière autonome. La plate-forme développée ici, quant à elle, offrira au chirurgien quelque chose de plus: la sensation de contact.
Jon Rock Legrain. Vicomtech-IK4 : Les robots utilisés aujourd'hui en chirurgie, bien qu'ils soient des machines innovantes et avancées, n'offrent toujours pas cette sensation de toucher les tissus. Il n'est pas égal de couper le muscle ou l'os, et la force exercée doit en dépendre. Nous avons obtenu une rétroaction de la force du robot sur le phantome.
Camilo Cortés. Vicomtech-IK4 : Nous avons installé un capteur de force sur le robot. Nous envoyons ces informations à un appareil haptique qui fait la force à travers une série d'actionneurs.
SHABS RAJASEKHARAN Vicomtech-IK4 : Parfois, les idées sortent d'ici. Nous discutons avec les médecins (nous travaillons avec BioDonostia, par exemple), nous leur expliquons nos idées et nous vérifions si elles ont un sens dans leur domaine de travail. D'autres fois, les entreprises se tournent vers nous. Ils savent très bien ce qu'ils veulent et ils viennent avec un plan détaillé: ‘regarde, nous avons ce produit et nous voulons ajouter de la valeur ajoutée. Que nous offrez-vous?’
La chirurgie robotique et guidée par l'image, ce sont des moyens de se rapprocher d'une médecine non invasive. La contribution de l'informatique à la médecine jusqu'à présent est grande et les possibilités qu'elle offre pour l'avenir sont spectaculaires.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian