
Buscando o robot "ideal"
2010/08/08 Aulestiarte Lete, Izaro - Elhuyar Zientziaren Komunikazioa

Un grupo de investigadores da Universidade de Oregón deu a coñecer recentemente o traballo que desenvolve entre as mans. Antes de finalizar o verán quere presentar o robot “innovador”. Será capaz de camiñar e correr con facilidade. Con todo, una das prioridades do grupo é reducir a cantidade de enerxía que utilizan outros robots similares.
Ademais, o equipo considera que o proxecto podería axudar a crear nos futuro robots paira misións complexas, “mesmo paira crear próteses que poderían ser mellor controladas ou para que algunhas persoas que se desprazan en cadeira de rodas poidan ter certa capacidade de camiñar”.
En xeral, os robots están deseñados paira traballos mecánicos. Empréganse en situacións concretas e controladas, a maioría delas paira a realización de accións ou actividades que se repiten unha e outra vez. Entre outras cousas, relacionámolas facilmente coas áreas da exploración espacial, a automoción ou a industria produtiva. “Pero en canto á locomoción, os seres humanos e outros animais son difíciles de emular”, afirmou un dos seus membros.

BigDog é un robot capaz de facer fronte a case calquera trastorno. Con todo, consome moita enerxía. (Foto: Boston Dynamics ) .
“Durante moito tempo, os expertos baseáronse principalmente na experiencia e a intuición paira traballar na locomoción dos robots. Nós, con todo, quixemos dar un paso atrás paira analizar a dinámica básica do sistema mecánico e determinar cal pode ser o comportamento real paira un determinado sistema robótico. É dicir, una pedra non pode voar, independentemente do software que se prepare paira ela”, engadiu. Desde este punto de vista, a clave sería determinar coa necesaria eficacia que elementos van funcionar e cales non, “mesmo antes da súa fabricación”.
Combinando modelos
Cunha pequena cantidade de enerxía, os seres humanos podemos movernos facilmente por terreos abruptos. Entre outras cousas, conseguimos o equilibrio a través dos músculos e tendóns. E temos diferentes formas de medir e utilizar ben as forzas: podemos manter un obxecto nun lugar fixo e nunha estrada chea de buracos, indo en coche, tamén podemos evitar que se derrame o contido da cunca de café.

Os robots aínda non poden moverse tan elegantemente como os humanos. (Foto: Boris Furlan).
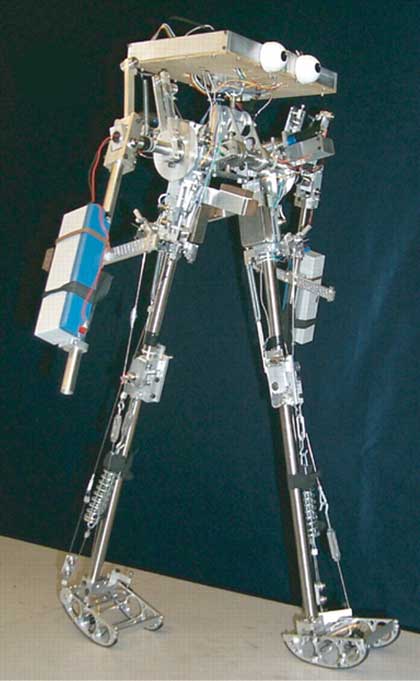
Con todo, a maioría dos robots móbiles ou runners deben estar o máis ríxidos posible até conseguir una forma básica de camiñar, non poden moverse tan elegantemente como os humanos. Ademais, o proceso require moita enerxía e redúcense os seus posibles valores e aplicacións.
O equipo estadounidense ha explicado que quere axuntar dous modelos de robots dispoñibles no mercado. “Nas chairas hai robots que poden funcionar ben sen control activo, necesitan pouca enerxía, pero se desencadean mal ante as alteracións”, explica. Paira simular a marcha humana utilízase una técnica chamada dinámica pasiva. Isto permite aproveitar a inercia e a gravidade dun paso paira utilizala no seguinte paso, evitando que o robot necesite máis enerxía que os humanos.
“Pois ben, nós queremos combinar estes robots con dinámica pasiva cos robots que se atopan no outro extremo, como é o caso de BigDog, que, a pesar de consumir moita enerxía, son capaces de facer fronte a case calquera perturbación”, afirmou. “En definitiva, a clave está en aproveitar os controis activos ou motores só nos momentos necesarios. O software asumirá o control ante a aparición dunha alteración, sendo a dinámica pasiva a protagonista durante todo o resto do proceso”.
Publicado en 7K

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia