
Looking for the "ideal" robot
2010/08/08 Aulestiarte Lete, Izaro - Elhuyar Zientziaren Komunikazioa

A group of researchers from the University of Oregon recently unveiled the work it carries out in their hands. Before the end of the summer he wants to present the “innovative” robot. You will be able to walk and run easily. However, one of the group's priorities is to reduce the amount of energy used by other similar robots.
In addition, the team believes that the project could help create robots for complex missions in the future, “even to create prostheses that could be better controlled or for some wheelchair users to have some ability to walk.”
In general, robots are designed for mechanical work. They are used in specific and controlled situations, most of them for carrying out actions or activities that are repeated over and over again. Among other things, we easily relate them to the areas of space exploration, automotive or the productive industry. “But as for locomotion, humans and other animals are difficult to emulate,” said one of its members.

BigDog is a robot capable of dealing with almost any disorder. However, it consumes a lot of energy. (Photo: Boston Dynamics.
“For a long time, experts have relied mainly on experience and intuition to work on robot locomotion. We, however, wanted to take a step back to analyze the basic dynamics of the mechanical system and determine what the actual behavior can be for a certain robotic system. That is, a stone cannot fly, regardless of the software that is prepared for it,” he added. From this point of view, the key would be to determine with the necessary efficiency which elements will work and which will not, “even before its manufacture”.
Combining models
With a small amount of energy, humans can easily move through rough terrain. Among other things, we get balance through the muscles and tendons. And we have different ways to measure and use forces well: we can keep an object in a fixed place and on a road full of holes, going by car, we can also prevent spilling the contents of the cup of coffee.

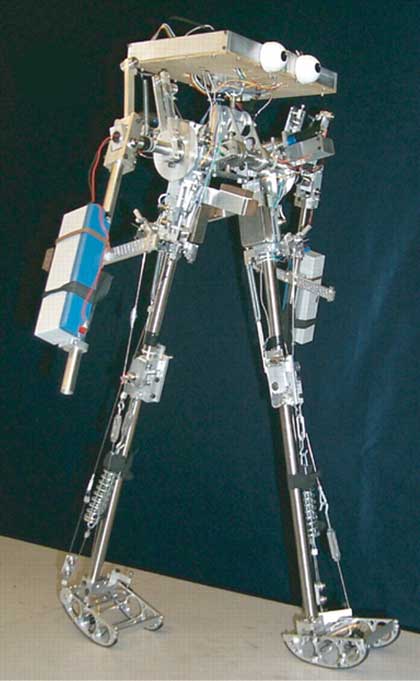
Robots still cannot move as elegantly as humans. (Photo: Boris Furlan).
However, most mobile robots or runners must be as rigid as possible until they get a basic way of walking, they cannot move as elegantly as humans. In addition, the process requires a lot of energy and its possible values and applications are reduced.
The American team has explained that it wants to combine two models of robots available in the market. “In the plains there are robots that can work well without active control, they need little energy, but they are triggered badly by alterations,” he explains. A technique called passive dynamics is used to simulate human gait. This allows you to take advantage of the inertia and gravity of a step to use it in the next step, preventing the robot from needing more energy than humans.
“Well, we want to combine these robots with passive dynamics with the robots that are at the other end, as is the case of BigDog, who, despite consuming a lot of energy, are able to cope with almost any disturbance,” he said. “In short, the key is to take advantage of active controls or engines only at the necessary times. The software will take over the appearance of an alteration, with passive dynamics being the protagonist throughout the rest of the process.”
Published in 7K

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia