
Buscando el robot "ideal"
2010/08/08 Aulestiarte Lete, Izaro - Elhuyar Zientziaren Komunikazioa

Un grupo de investigadores de la Universidad de Oregón ha dado a conocer recientemente el trabajo que desarrolla entre las manos. Antes de finalizar el verano quiere presentar el robot “innovador”. Será capaz de caminar y correr con facilidad. Sin embargo, una de las prioridades del grupo es reducir la cantidad de energía que utilizan otros robots similares.
Además, el equipo considera que el proyecto podría ayudar a crear en el futuro robots para misiones complejas, “incluso para crear prótesis que podrían ser mejor controladas o para que algunas personas que se desplazan en silla de ruedas puedan tener cierta capacidad de caminar”.
En general, los robots están diseñados para trabajos mecánicos. Se emplean en situaciones concretas y controladas, la mayoría de ellas para la realización de acciones o actividades que se repiten una y otra vez. Entre otras cosas, las relacionamos fácilmente con las áreas de la exploración espacial, la automoción o la industria productiva. “Pero en cuanto a la locomoción, los seres humanos y otros animales son difíciles de emular”, ha afirmado uno de sus miembros.

BigDog es un robot capaz de hacer frente a casi cualquier trastorno. Sin embargo, consume mucha energía. (Foto: Boston Dynamics ) .
“Durante mucho tiempo, los expertos se han basado principalmente en la experiencia y la intuición para trabajar en la locomoción de los robots. Nosotros, sin embargo, hemos querido dar un paso atrás para analizar la dinámica básica del sistema mecánico y determinar cuál puede ser el comportamiento real para un determinado sistema robótico. Es decir, una piedra no puede volar, independientemente del software que se prepare para ella”, ha añadido. Desde este punto de vista, la clave sería determinar con la necesaria eficacia qué elementos van a funcionar y cuáles no, “incluso antes de su fabricación”.
Combinando modelos
Con una pequeña cantidad de energía, los seres humanos podemos movernos fácilmente por terrenos abruptos. Entre otras cosas, conseguimos el equilibrio a través de los músculos y tendones. Y tenemos diferentes formas de medir y utilizar bien las fuerzas: podemos mantener un objeto en un lugar fijo y en una carretera llena de agujeros, yendo en coche, también podemos evitar que se derrame el contenido de la taza de café.

Los robots todavía no pueden moverse tan elegantemente como los humanos. (Foto: Boris Furlan).
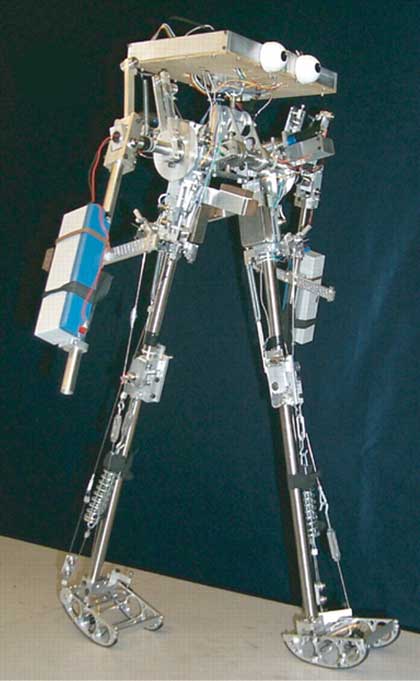
Sin embargo, la mayoría de los robots móviles o runners deben estar lo más rígidos posible hasta conseguir una forma básica de caminar, no pueden moverse tan elegantemente como los humanos. Además, el proceso requiere mucha energía y se reducen sus posibles valores y aplicaciones.
El equipo estadounidense ha explicado que quiere aunar dos modelos de robots disponibles en el mercado. “En las llanuras hay robots que pueden funcionar bien sin control activo, necesitan poca energía, pero se desencadenan mal ante las alteraciones”, explica. Para simular la marcha humana se utiliza una técnica llamada dinámica pasiva. Esto permite aprovechar la inercia y la gravedad de un paso para utilizarla en el siguiente paso, evitando que el robot necesite más energía que los humanos.
“Pues bien, nosotros queremos combinar estos robots con dinámica pasiva con los robots que se encuentran en el otro extremo, como es el caso de BigDog, que, a pesar de consumir mucha energía, son capaces de hacer frente a casi cualquier perturbación”, ha afirmado. “En definitiva, la clave está en aprovechar los controles activos o motores sólo en los momentos necesarios. El software asumirá el control ante la aparición de una alteración, siendo la dinámica pasiva la protagonista durante todo el resto del proceso”.
Publicado en 7K

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia