
Exploradores transterrestres
2014/04/01 Azkune Galparsoro, Gorka - Ikertzailea eta irakasleaEuskal Herriko Unibertsitateko Informatika Fakultatea Iturria: Elhuyar aldizkaria
Os riscos de viaxar a Marte e as razóns económicas han feito que o ser humano aínda non poida chegar a ela. Pero no seu lugar xa enviou a uns exploradores especiais: robots.
En 1997 chega a Marte o primeiro robot da NASA: Robot Sojourner. En 2004 chegaron dous robots xemelgos a inspeccionar o planeta vermello: Spirit e Opportunity . Aínda que inicialmente a súa misión debía durar 3 meses, Opportunity segue traballando! Spirit, pola súa banda, enviou o seu último sinal en 2010.
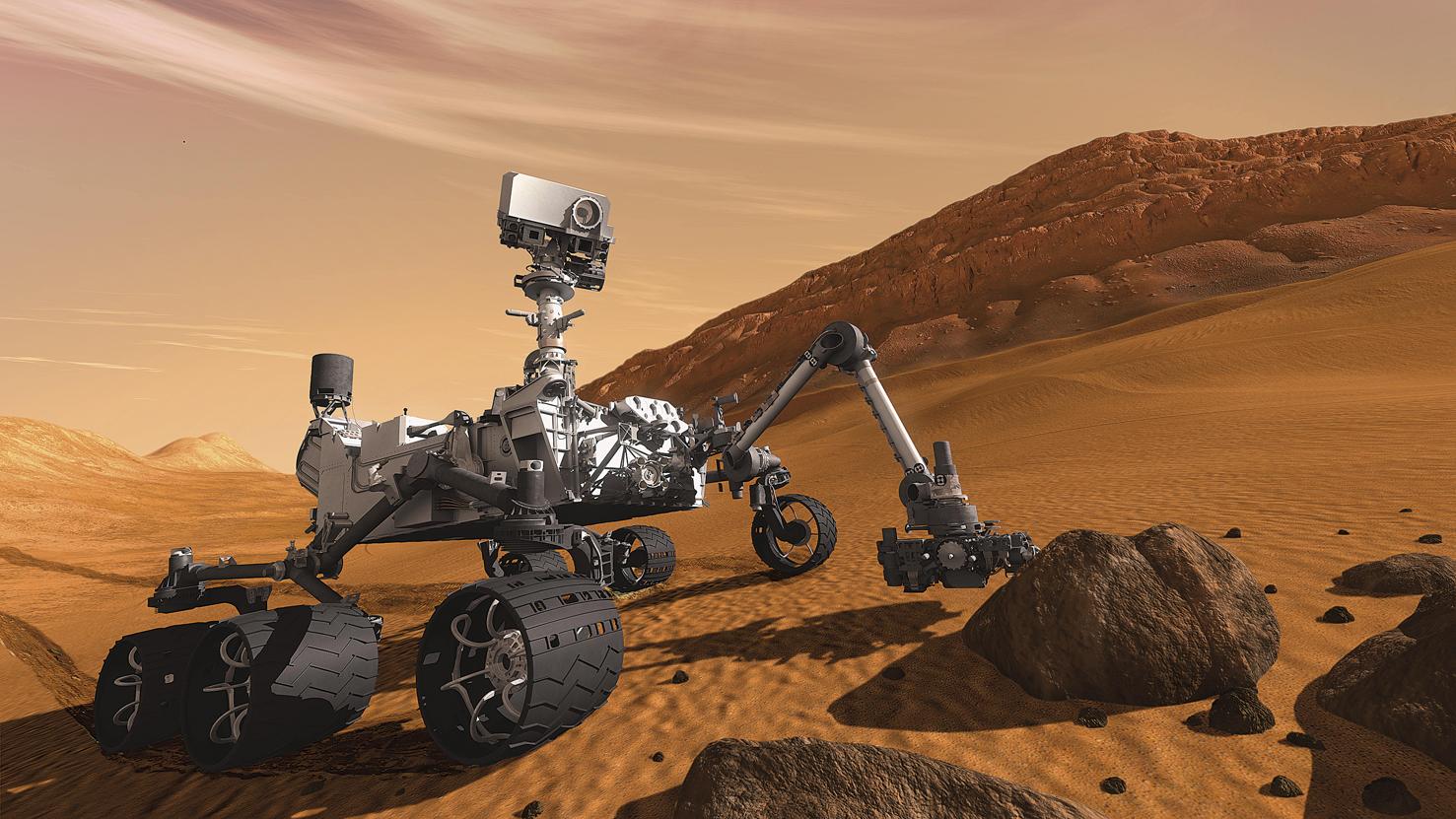
Finalmente, en agosto de 2012 chegou a Marte o robot Curiosity (ver figura 1). Curiosity pode ser considerado o irmán maior dos seus antecedentes. Máis avanzada tecnoloxicamente, de maior tamaño, xa está a estudar a superficie terrestre e a atmosfera de Marte, utilizando todos os sensores e aparellos ao seu alcance.
Laboratorio científico de Marte
Curiosity non é só un robot, é un laboratorio completo con ambiciosos obxectivos científicos. Os seus obxectivos son:
· Determinar si houbo algunha forma de vida en Marte.
· Coñecer o clima de Marte.
· Estudo da xeoloxía marciana.
· Colaborar na preparación de futuras viaxes humanas.
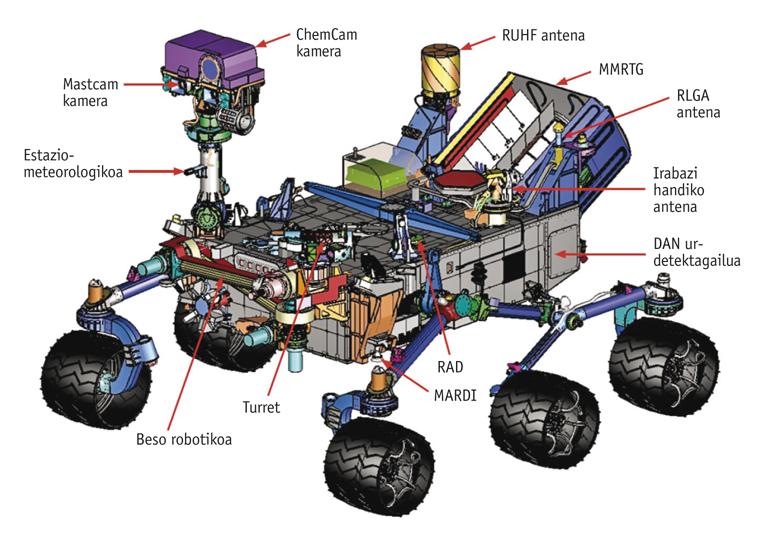
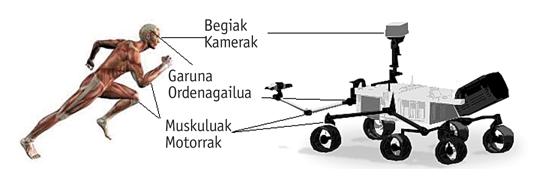
Paira o bo desempeño do traballo, o robot converteuse nun laboratorio móbil, dotado de equipos de máximo nivel. Na figura 2 móstranse os principais dispositivos do robot. En resumo, Curiosity conta con 17 cámaras con diferentes obxectivos, antenas de comunicación coa Terra, un brazo robótico con sensores e once aparellos paira a análise de mostras de chan. Destacan sobre todo o dispositivo de detección de auga DAN e a estación de estudo climático (REMS).
Ademais de que todo isto sexa tremendo, Curiosity necesita a capacidade de desprazarse paira facer o seu traballo, recoller unha chea de datos e facelos chegar aos investigadores da Terra. É dicir, o noso robot debe moverse por Marte paira chegar aos lugares máis interesantes e pór en marcha alí os seus aparellos. Por suposto, paira iso ten as seis rodas. Tamén un brazo robótico. Por tanto, parece que bastaría con ter una persoa na Terra que saiba conducir o robot coa información que reciben as cámaras de Curiosity. Sería como un videoxogo. Ou non?
Necesidade de robots autónomos
Desde a terra non se pode conducir un robot que está en Marte. Dous son as razóns principais que fan imposible:
1) Atraso na comunicación: Tendo en conta as posicións relativas de Marte e a Terra, una sinal tarda entre 8 e 42 minutos en desprazarse.
2) Comunicación periódica: A comunicación entre a Terra e Marte realízase mediante unhas sondas situadas na órbita de Marte. Estas sondas deben estar orientadas cara á Terra paira poder emitir información. En consecuencia, a comunicación co robot non pode ser continua.
Así as cousas, o control remoto non é suficiente. Necesitamos algo máis avanzado si queremos ter éxito. A clave é a autonomía.
Aínda que o concepto de autonomía é aplicable a moitas das funcións dos robots, nós centrarémonos nunha capacidade: autonomía da mobilidade ou navegación autónoma. Esta habilidade é absolutamente básica para que un robot que está noutro planeta sexa útil.
Os seres humanos temos esa habilidade. Paira iso, é imprescindible detectar a contorna (os sentidos), ensaiar o percibido (o cerebro), tomar decisións sobre o interpretado (o cerebro) e executar esas decisións (os músculos). Traballouse moito paira dotar aos robots das mesmas capacidades. O resultado móstrase na figura 3: en lugar dos ollos, Curiosity ten cámaras; en lugar do cerebro, computadores; e en lugar dos músculos, ten motores nas rodas. Por tanto, temos todos os elementos necesarios paira ter autonomía, pero agora fáltanos un paso máis. Como se poden utilizar estes elementos para que o robot navega de forma autónoma?
Navegación autónoma
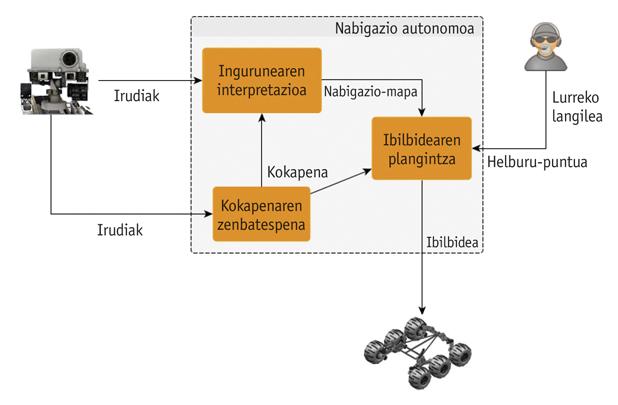
Estamos ante unha capacidade imprescindible. Se un robot non pode moverse paira explorar a súa contorna, serviranos paira pouco. A navegación autónoma defínese como a capacidade de desprazamento dun punto a outro dun medio, evitando obstáculos. No caso de Curiosity, o problema da navegación divídese en tres subbloques: interpretación da contorna, planificación do percorrido e estimación da súa localización. Imos velo uno a un.
Interpretación da contorna
Dado que o noso robot está situado nunha contorna descoñecida, é necesario detectar os obxectos que lle rodean e as características do chan antes de realizar calquera movemento. Se ten una pedra diante, non debería avanzar porque pode chocar coa pedra. Paira evitar a pedra é imprescindible interpretar os datos que recibe da contorna.
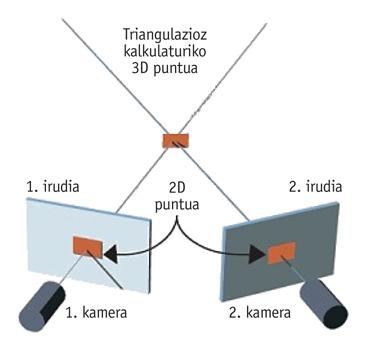
Paira iso, Curiosity utiliza dous cámaras e non é casualidade. Se o ser humano ten visión en 3 dimensións, é porque utilizamos en gran medida dous ollos. Como se pode observar na figura 4, paira os robots seguiuse o mesmo modelo. A idea é sinxela. Ambas as cámaras debuxan dúas imaxes diferentes do mesma contorna. Entre ambas as imaxes hai un pequeno desprazamento, una diferenza proporcional á distancia entre cámaras. A separación dun mesmo punto en cada imaxe permite calcular facilmente, mediante triangulación, a posición deste punto no medio en 3 dimensións.
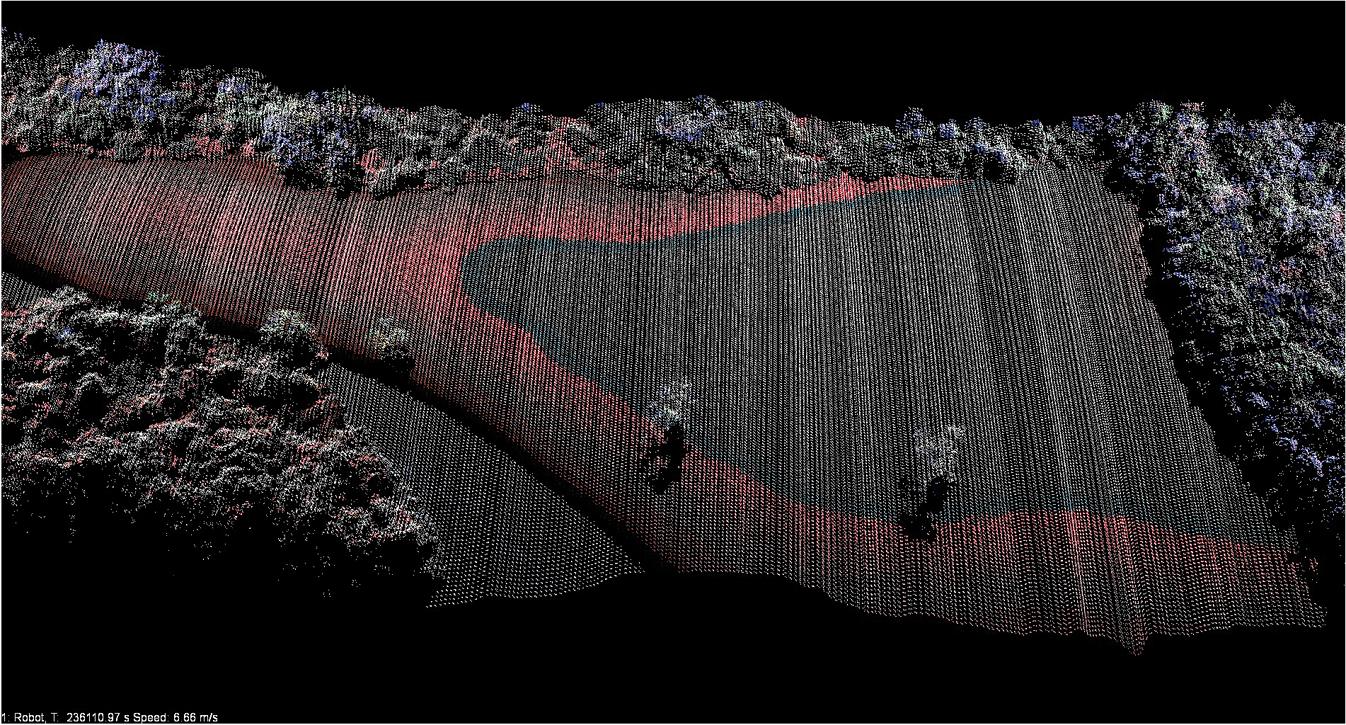
Si somos capaces de emparellar moitos puntos en ambas as imaxes, podemos obter una nube de puntos da contorna. Una nube de puntos é un conxunto de puntos de 3 dimensións. A modo de exemplo, na figura 5 móstrase una nube de puntos obtida nun bosque. Curiosity consegue este tipo de nubes de puntos en Marte e o seu traballo consiste en diferenciar as características do medio a través destas nubes. Por exemplo, lugares que non pode atravesar, pendentes, buracos, etc. O resultado deste proceso é un mapa de navegación da contorna no que se distinguen as zonas navegables e as non navegables.
Planificación do percorrido
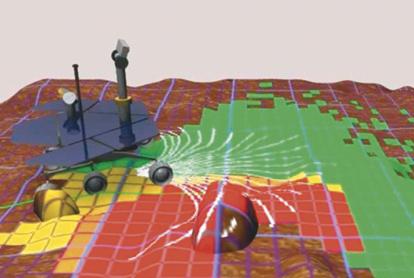
Do mesmo xeito que os dispositivos GPS dos coches, Curiosity calcula a ruta máis curta desde o seu lugar até o punto de destino. Esta planificación realízase sobre os mapas de navegación obtidos mediante cámaras, tal e como se mostra na figura 6. Paira iso, ten en conta todas as rutas que o robot pode executar. Se estas rutas entran en zonas non navegables descártanse. Entre as rutas posibles minimízase o número de movementos e selecciónanse as que se atopan máis afastadas das barreiras, utilizando algoritmos de procura.
Estimación de localización
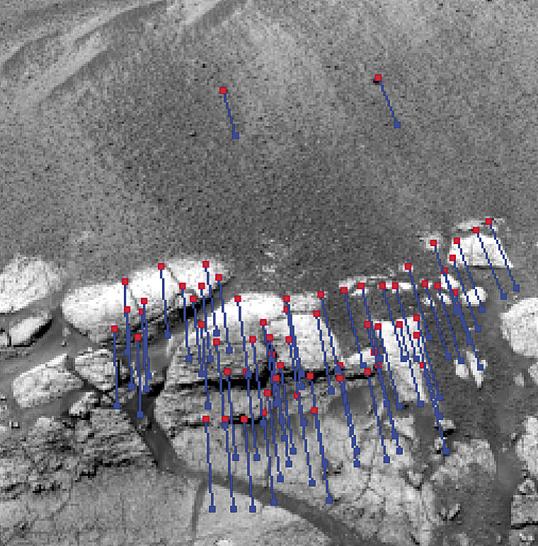
A navegación non é posible si non sabemos onde estamos co noso punto obxectivo. Se nos mandan avanzar 10 metros polo lugar no que nos atopamos, é imprescindible saber en todo momento canto desprazamos desde o punto de partida e, por tanto, onde estamos respecto ao obxectivo. A mellor forma de medir estes desprazamentos é mediante odometría visual. Una vez máis, mediante dous cámaras sepárase unha chea de puntos significativos da contorna e calcúlanse as súas coordenadas en 3 dimensións. Cando chega una nova imaxe identifícanse os mesmos puntos que na imaxe anterior e mídese o seu desprazamento respecto da imaxe antiga. Así pois, como este desprazamento é consecuencia do movemento do robot, calcúlase o desprazamento real do robot. O resultado deste proceso móstrase na figura 7.
Combinando as tres capacidades descritas, Curiosity consegue que Marte se mova e que acuda a casaca ás zonas ordenadas polo persoal da Terra. A figura 8 mostra una descrición resumida do proceso.
Futuro
Hai en marcha grandes proxectos paira coñecer máis a fondo Marte. Quizá o máis atractivo é o Mars Sample Return 1. En concreto, NASA e ESA (Axencia Espacial Europea) colaboran paira enviar un novo robot a Marte e traer á Terra as mostras que alí recolle. Paira esta tarefa o novo robot deberá ter un maior grao de autonomía.
A misión terá una duración determinada, xa que a devolución do envase enviado a Marte é máis difícil a medida que transcorre o tempo. Por iso, o robot deberá ter a capacidade de realizar mapas completos da súa contorna. Deberá lembrar os percorridos que realizou desde o buque até o punto de recollida das mostras paira lograr una planificación máis rápida. Paira una mellor navegación, deberá coñecer as características do chan a través da vista: si é area ou lodo, paira evitar zonas esvaradías, etc.
Todo isto xa se conseguiu na Terra, por que non en Marte? A razón principal é que os computadores que se envían ao espazo teñen as súas limitacións. Debido aos cambios de temperatura, radiación e consumo enerxético, os dous computadores de Curiosity teñen a capacidade dos computadores que estaban nos nosos fogares fai 10 anos. E así é moi difícil conseguir o nivel de autonomía que necesitan.
En consecuencia, hai moito que facer nos computadores espaciais e na eficiencia dos algoritmos. E farase ese traballo. Enviaranse máis robots tanto ao planeta vermello como a outros. Eles serán os nosos exploradores e antecedentes. Porque algún día o home chegará a eses fascinantes mundos máis aló da Terra.
Bibliografía

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia