
Systèmes de positionnement par satellite divers
2015/12/01 Zubizarreta Arano, Xabier - Fraunhofer IIS-ko Satelite Hargailuen departamentuko ikertzailea (Nurenberg, Alemania) Iturria: Elhuyar aldizkaria
Pour pouvoir voyager efficacement du point A au point B, il est nécessaire de connaître son emplacement exact. Depuis deux mille ans, l'humanité a cherché cet objectif. XVI. et XVII. commerce et colonisation des XXe siècles. Les guerres froides et chaudes du XXe siècle nous ont amené à connaître ces points avec une précision de millimètres. Pour cela, les progrès en mathématiques, astronomie et horlogerie ont été nécessaires.
Pour une bonne navigation, il faut d'abord établir un système de référence ou de coordonnées. Les anciens Grecs savaient que la terre était sphérique et, apparemment, ils avaient une idée étroite de sa taille. Avec peu de changements, votre système de référence est arrivé aujourd'hui : le système de latitude et de longitude.
La définition et la mesure de latitude étaient simples, car il existait une référence naturelle, l'équateur, et les deux pôles distaient 90° par rapport à l'équateur. Tout cela était facile à mesurer grâce à l'étoile polaire. Cependant, la mesure de longueur s'est avérée plus compliquée, car aucune référence naturelle pour la mesure n'existait. Le XVII a été la création de systèmes de mesure de longueur. et XVIII. Travail de plusieurs scientifiques et artisans de siècles. La précision de la longueur était intimement liée à la mesure du temps, puisque la Terre en 24 heures fait un tour de 360°, soit 15° par heure. Ainsi, si vous pouvez connaître la différence entre les heures locales de deux endroits, vous pouvez également connaître la différence de longueur entre eux.
Le charpentier britannique John Harrison (1693-1776), en 1761, remporta le prix de 20 000 livres, à une époque de fortune, pour créer la montre la plus précise jamais inventée jusqu'alors. La montre pesait 27 kg et provoquait une erreur quotidienne d'une seule seconde. Par exemple, il faudrait passer mille ans pour que le verre à quartz portant les montres actuelles entraîne une erreur d'une seconde. Le chronographe de Harrison a permis pour la première fois dans l'histoire de mesurer la longueur avec une précision acceptable.
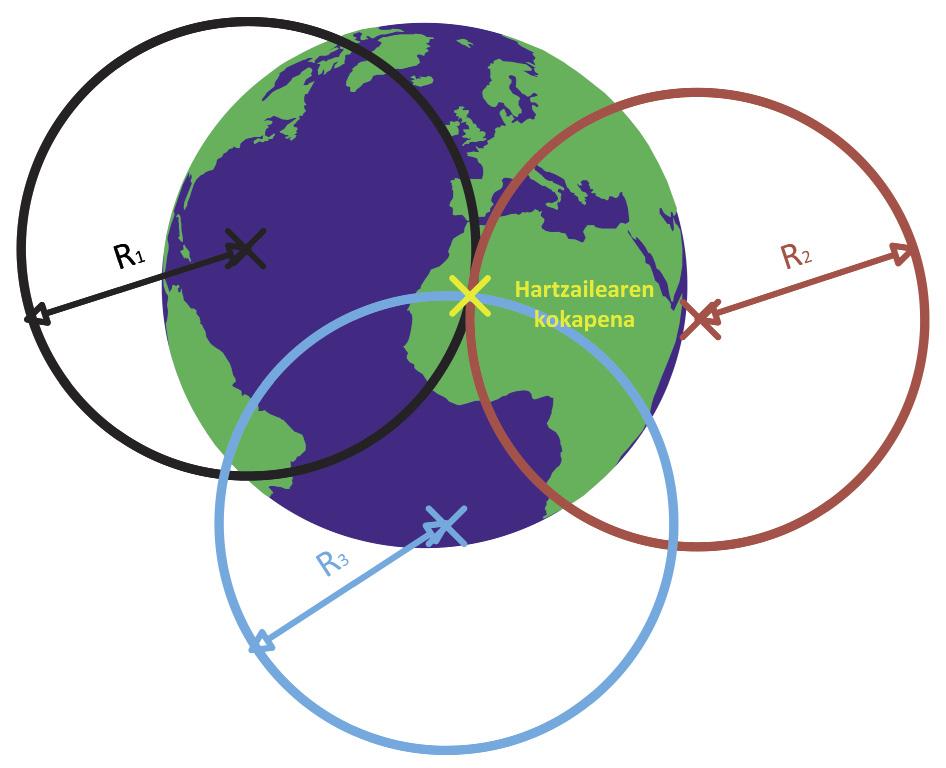
XX. Au XXe siècle, la découverte des dispositifs radio et des ondes radio a révolutionné le monde de la navigation. Ils ont vite réalisé que les ondes radio se propageaient à une certaine vitesse. Malheureusement, encore une fois, le problème principal était de mesurer le temps. En fait, la vitesse de propagation des ondes radio rendait nécessaire des montres de plus en plus précises pour effectuer des mesures avec une précision remarquable. En fait, si l'emplacement de la station de transmission k (x k, y k ,z) et le moment de transmission sont exactement connus, il serait facile de calculer la distance entre celle-ci et le récepteur (d k). La procédure appelée trilatération permet donc de calculer la position du récepteur (x,y,z) lorsqu'au moins 3 points et moments de transmission sont connus.
,(x{x1)2+(y{y1)2+(z{z1)2 = d1
,(x{x2)2+(y{y2)2+(z{z2)2 = d2
,(x{x3)2+(y{y3)2+(z{z3)2 = d3
Bien sûr, il est essentiel de mesurer précisément le temps. En outre, le récepteur doit recevoir des ondes radio, de sorte que les points de transmission doivent être accessibles à tout moment ou, mieux, visibles. En 1957, juste au moment où l'Union soviétique a mis en orbite le satellite Sputnik 1, des scientifiques du monde entier se sont rendu compte qu'il n'y avait pas lieu plus approprié que l'orbite autour de la Terre à tout moment et en tout lieu pour établir les émetteurs disponibles. Après la compétition spatiale des années 60, les Américains ont commencé à développer le système GPS bien connu, mais jusqu'en 1995 il n'a pas été opérationnel et a passé 7 ans de plus, jusqu'à ce que le gouvernement Clinton a rendu public le signal de précision militaire. Peu après, les Russes ont commencé à rivaliser, mais n'ont pas réussi à rendre le système GLONASS 100% disponible jusqu'en 2011.
Bien que les États-Unis et l'Union soviétique soient des pionniers dans les systèmes de positionnement par satellite, actuellement plusieurs agences spatiales et gouvernements prennent des mesures pour construire leur propre système. Entre autres, en 2000, ESA (Agence spatiale européenne) a commencé à développer le système Galileo. Même s'il devait d'abord être opérationnel en 2008 et offrir une précision mondiale de 4 m (10 fois supérieure au GPS), les tensions politiques des États membres du projet et la pression du gouvernement américain sont encore en phase de développement. Selon les dernières prévisions de l'ESA, il devrait être disponible d'ici 2020.
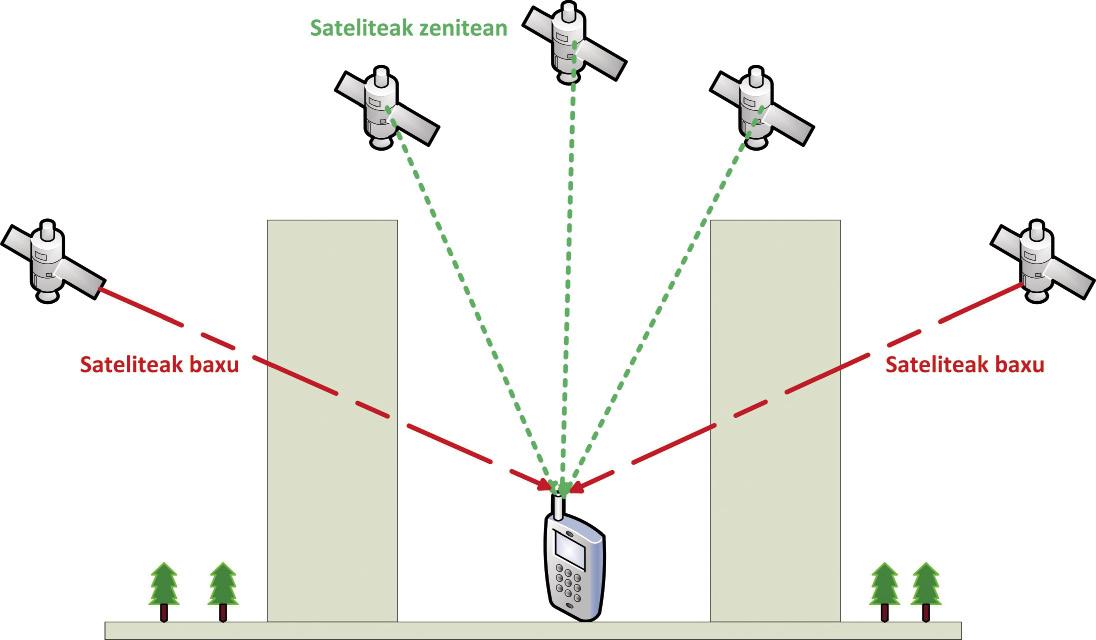
La Chine a également pris des mesures avec le système appelé BeiDou. Ce système, qui a commencé à se développer en 2006, est déjà très utile dans la zone Asie-Pacifique. Le Japon et l'Inde disposent également de leurs propres systèmes, QZSS (Système de navigation Ia Zenit) et IRNSS (Système de navigation par satellite de la région Inde), respectivement, bien qu'au lieu d'être des systèmes autonomes, ils ne fonctionnent que comme «auxiliaires» d'autres systèmes. Par exemple, le QZSS japonais offre un signal plus fort dans certains environnements. Tous les satellites de la constellation se trouvent à tout moment dans un grand angle de levage, au-dessus du récepteur, d'où son nom. De cette façon, il est possible d'éviter les voies de propagation entravées par les bâtiments, atteignant clairement le signal GPS aux canons urbains si habituels au Japon.
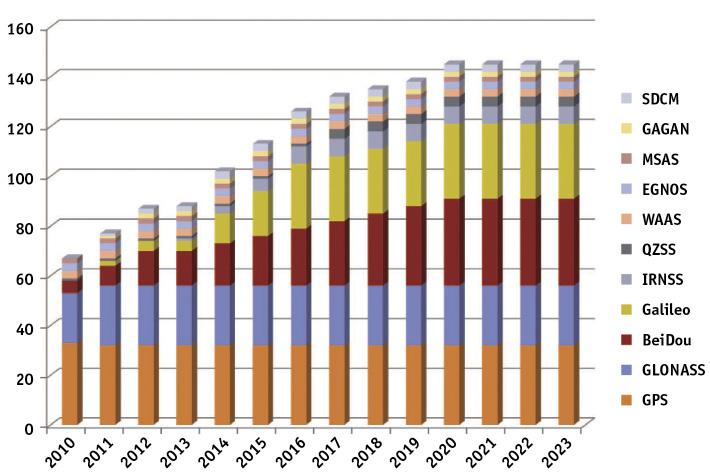
Si les prévisions des agences spatiales sont respectées, les systèmes conventionnels seront améliorés en quelques années et de nouveaux systèmes seront mis en place. Ainsi, le nombre de satellites des systèmes de navigation subira une augmentation notable.
Même si les systèmes de satellite actuellement disponibles sont si nombreux et différents, ils ont tous un fonctionnement similaire, celui de la trilatération mentionnée ci-dessus. Normalement, les satellites ont une orbite Kepler pour calculer leur position et émettent un message avec le paramètre de temps. Ce message est modulé par un signal cyclique PRN (bruit pseudo-aléatoire) d'une certaine longueur et fréquence. Bien que le signal PRN ait un spectre similaire au bruit blanc dans le domaine de fréquence, il suit une séquence prédéfinie. Ainsi, la corrélation permet de calculer à quel moment le signal est reçu dans le code PRN. Le satellite émet également des paramètres qui relient le moment du code PRN au moment du temps. Ainsi, connaissant le temps d'émission et les temps de réception, on connaît immédiatement la distance parcourue par le signal d voyagé = (capture - t émission ) x c, où c est la vitesse de la lumière.
Cependant, cette méthode a deux problèmes principaux : d'abord, bien que toutes les montres des satellites d'un certain système soient exactement synchronisées, l'horloge du satellite et l'horloge du récepteur ne sont pas synchronisées. En outre, la précision des montres atomiques de rubidium des satellites n'est pas comparable à la montre à quartz que nos mobiles ont. La solution à ce problème est simple. Une nouvelle variable est ajoutée à la procédure de trilatération qui montre la différence temporelle entre récepteur et émetteur (dt). Dans ce cas, il faut donc utiliser au moins quatre satellites:
• ,(x{x1)2+(y{y1)2+(z{z1)2 +?t= d1
,(x{x2)2+(y{y2)2+(z{z2)2 +?t= d2
• ,(x{x3)2+(y{y3)2+(z{z3)2 +?t= d3
,(x{x4)2+(y{y4)2+(z{z4)2 +?t= d4
Le deuxième problème est plus complexe. En fait, jusqu'ici la diffusion du signal a été considérée uniforme et constante. En réalité, cependant, plusieurs phénomènes peuvent modifier la propagation du signal. Par exemple, la couche atmosphérique, appelée ionosphère, située entre 100 et 600 km de la surface terrestre, est formée de particules ionisées par rayonnement solaire. Cette charge électrique modifie la vitesse et le moyen de propagation des ondes radio. D'autre part, dans la partie la plus proche de la surface terrestre, la troposphère accumule 80% de la masse atmosphérique terrestre. Il s'agit principalement de vapeur d'eau, qui modifie également l'indice de réfraction de l'air et donc la voie de propagation des ondes. Enfin, sur la surface elle-même, la réflexion, l'élargissement multicanal (multipath propagation) et les obstacles viaires détournent également le signal. La difficulté à modéliser en détail ces effets est la principale source d'erreur dans la précision du système de navigation par satellite.
Ces erreurs peuvent être largement corrigées via le système DGPS (Système différentiel de positionnement mondial). Ces systèmes sont basés sur des stations de mesure au sol. Les stations de mesure calculent leur position en utilisant leurs propres satellites GPS ou satellites et, en connaissant précisément leur emplacement, calculent la différence entre l'emplacement calculé et l'emplacement réel. Ensuite, vous pouvez compter l'erreur des effets atmosphériques et le transmettre par radio à qui vous pourriez être intéressé. Ce système permet d'améliorer la précision de position de 10 à 0,2 m. Bien sûr, les principaux utilisateurs du DGPS proviennent du monde de l'aviation, de la cartographie et du domaine militaire. Chaque pays ou entité utilise son propre système DGPS, par exemple: WAAS américain, EGNOS européen, GAGAN indien, MSAS japonais et SDCM russe.
Il est donc évident qu'à l'avenir, on aura tendance à utiliser tous les systèmes disponibles via des récepteurs capables d'utiliser simultanément plusieurs systèmes satellitaires. Ces récepteurs offrent de nombreux avantages. Par exemple, un service plus fiable est offert, car si certains systèmes satellite ne pouvaient pas être utilisés intentionnellement ou involontairement, ils pourraient être des alternatives. Évidemment, si nous augmentons le nombre de satellites, la zone dans laquelle le récepteur serait efficace serait également plus large. De plus, si le récepteur, en plus d'être adapté à plusieurs systèmes, avait la capacité de recevoir un signal multi-fréquences, il serait plus robuste par rapport aux interférences. D'autre part, il faut dire que ce type de récepteurs présente également des inconvénients, car en plus d'avoir une plus grande complexité, tous les systèmes satellite n'ont pas été conçus pour être compatibles. C'est-à-dire, parfois, l'amélioration ou l'information offerte par les satellites des deux systèmes en raison de leur emplacement similaire peut être redondant.
Les récepteurs multi-satellites n'ont pas pu se développer jusqu'à ces dernières années de manière pratique, car le GPS était le seul système disponible. Ces dernières années, cependant, l'ouverture de GLONASS et BeiDou a contribué à l'apparition de ce type de récepteurs. Par exemple, les derniers modèles mobiles d'Apple et de Samsung offrent un emplacement via GPS + GLONASS, et le fabricant Xiaomi, qui est en plein essor, a incorporé à ce binôme le système BeiDou dans ses derniers modèles.
Savoir où nous sommes a toujours été la volonté et le besoin des personnes. Nous sommes passés d'une époque de méconnaissance à une connaissance rapide et précise de notre position partout et à tout moment. Au cours des dernières décennies, les technologies de positionnement par satellite ont connu un grand essor. Encore une fois, on a constaté que la collaboration de diverses nations et institutions permet des avancées notables dans le domaine scientifique, technique et social.
Bibliographie Bibliographie

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia


