



Robots manuales con personas

¡Eureka acaba de empezar a montar gente! El último robot que han creado en IK4-Tekniker en el Museo de la Ciencia. Cuando hay un evento, lo comunica al público y conduce hasta allí, o realiza visitas guiadas explicando las exposiciones expuestas. Un robot pensado para interactuar directamente con las personas.
Es más habitual que los robots se dediquen a actividades industriales. Sin embargo, en general, su nivel de automatización es limitado. "Nosotros queremos llegar más allá", explica Urko Esnaola, investigador que trabaja con robots en la división de Industria y Transportes de Tecnalia. La introducción de la robótica avanzada en la industria permitiría "unir --añade Esnaolak-- las ventajas de los robots, como la fuerza, la precisión y la capacidad de repetición continua de tareas, con las características humanas que los robots no pueden tener. Las personas tenemos capacidad de adaptación. Somos capaces, por dar un ejemplo sencillo, de coger los tornillos en cualquier posición y colocarlos en la posición correcta en la pieza correspondiente. Pues bien, aunando las habilidades de ambos, queremos aumentar la producción mediante la puesta en marcha de robots y personas".
En la misma línea va el investigador de la unidad de Sistemas Autónomos e Inteligentes de IK4-Tekniker, Loreto Susperregi: "Nuestro objetivo es que las personas realicen tareas que aporten valor añadido al producto o proceso y automaticen tareas de bajo valor, que puedan suponer un riesgo o un perjuicio para la salud". Los centros de investigación tienen como objetivo lograr una industria más competitiva, y cuentan con once proyectos para ofrecer recursos robóticos.
Ejemplo de ello son el robot Hiro de Tecnalia y el desarrollado en el proyecto Robofoot de IK4-Tekniker. El primero se está desarrollando para el fabricante de aviones Airbus, concretamente para la operación de colocación de remaches en las alas de los aviones. "Hasta ahora una persona coloca los remaches en los orificios y otra los ataca con una máquina. Pues de momento hemos conseguido automatizar el primer paso", aclara Esnaola. Han aprovechado esta aplicación para “verificar y demostrar en qué tipo de aplicaciones se puede utilizar un robot de este tipo”, ha añadido. Con este desarrollo han conseguido el premio European Manufacturing Award 2012.
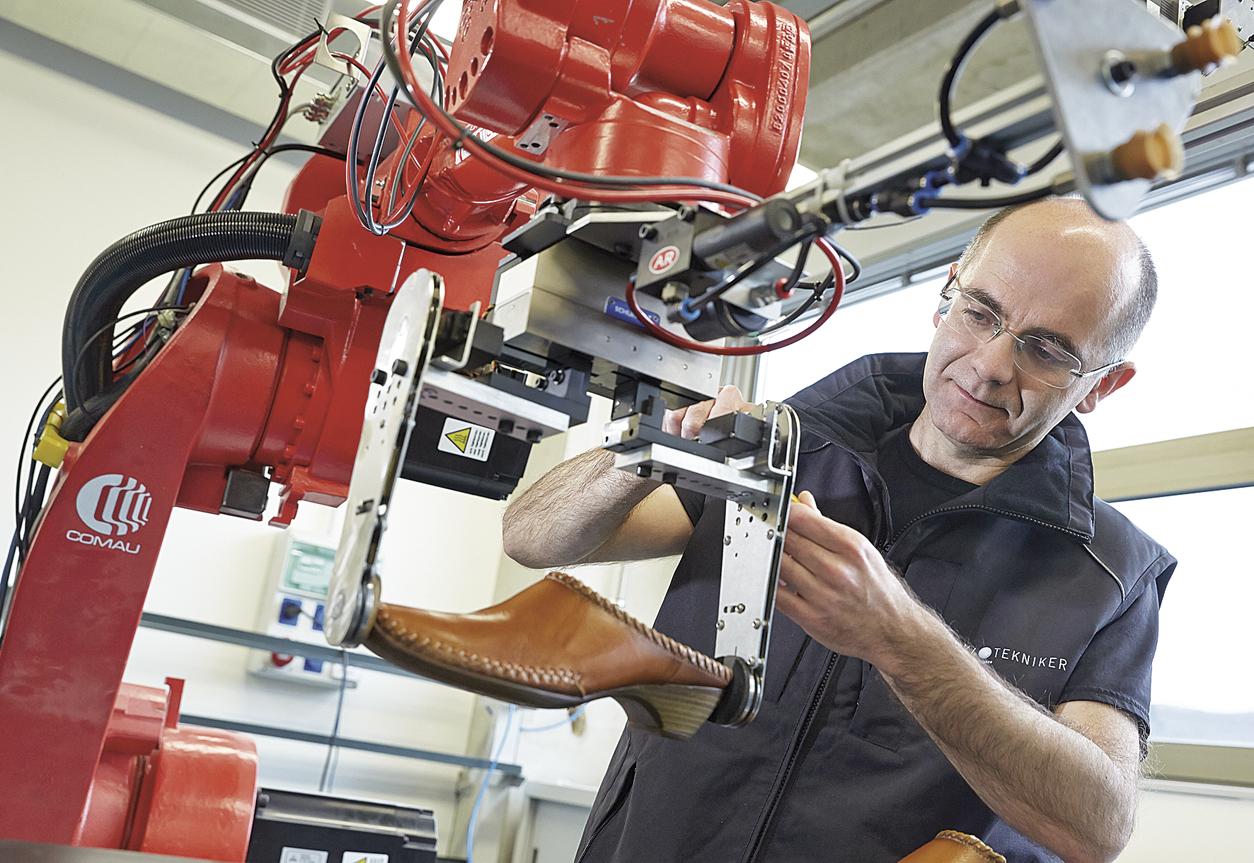
Por otro lado, en el proyecto Robofoot, IK4-Tekniker quiso probar si era posible la penetración del robot en el sector del calzado. "Iniciamos este proyecto porque se trata de un sector tradicional que aún no tiene el robot en su proceso de fabricación", explica Iñaki Maurtua, director de la Unidad de Sistemas Autónomos e Inteligentes de IK4-Tekniker. "El objetivo fue robotizar algunas de las tareas de fabricación, como el lijado, encolado, abrillantado, teñido y horma, soporte para el montaje de zapatos, apertura. También se puede utilizar para hacer la inspección una vez terminados los zapatos y para meter los zapatos en las cajas". El proyecto ha contado con la colaboración de la empresa de zapatos Pikolinos, que lo han probado en su proceso de fabricación, y "hemos demostrado que es posible introducir la automatización en este sector sin grandes esfuerzos económicos".

Robots fuera de jaulas
Con el objetivo de que los robots trabajen con las personas, los investigadores afirman que lo primero que hay que conseguir es que los robots y las personas compartan el mismo espacio. "Ahora los robots trabajan encajados en jaulas en la industria y nadie puede entrar en ella porque es peligroso", explica Esnaola. Las normas de seguridad son muy estrictas. Sin embargo, a medida que la tecnología avanza, "las normativas también están en proceso de cambio; van a decir qué medidas deben cumplir los robots y las personas para que estén colaborando", explica Susperregi.
Gracias a los sensores y cámaras que se están desarrollando, los robots pueden ser capaces de reconocer a las personas y evitar así el riesgo de tocar con ellas. Asimismo, los robots deberán ser capaces de superar las barreras que puedan hacer las personas. Para ello, los investigadores también están desarrollando la inteligencia: "Si el robot va de un punto a otro y encuentra algún obstáculo en el camino, debe ser capaz de cambiar su trayectoria y dirigir su planificación", explica Susperregi.
Intuitivamente, parece fácil de hacer, "porque los humanos somos muy buenos adaptándonos a los cambios --destaca Esnaola-. Pero introducir algo parecido a la intuición en los robots es un gran reto, ya que todo tiene que programarse".
Asimismo, se pretende que el intercambio entre robots y personas sea lo más sencillo posible y que el robot disponga de sistemas más intuitivos. "El objetivo es que el robot no sea algo que nos asuste porque no sabemos usarlo", dice Esnaola.
La mayor parte del trabajo a realizar para conseguirlo se encuentra en la programación. Según Esnaola, "la clave es introducir al robot un mayor nivel de inteligencia para que funcione mejor. A veces también tenemos que introducir el hardware porque el robot necesita una cámara mejor para una tarea concreta, o porque necesita unos ganchos diferentes para coger las piezas". Pero los investigadores vascos trabajan sobre todo con el software: "creamos comportamientos inteligentes con las señales de los sensores que tienen los robots", explica Maurtua.
Por ejemplo, el robot de Eureka! está lleno de sensores para poder detectar todo lo que le rodea. "Ha sido un gran reto poder navegar robots rodeados de gente. Y es que la gente se mueve, no es como una mesa estancada, algo que una vez percibido sólo hay que evitar --dice Susperregik-. Además, es muy importante que el robot sepa si el que tiene delante es una persona o no, para tener un comportamiento inteligente, es decir, para no empezar a hablar a una pared".
En contacto con las personas, Susperregi aclara que por el momento el robot tiene una interacción unidireccional: "habla a quien se encuentra delante, pero no es capaz de escuchar ni comprender lo que esa persona le puede decir". Sin embargo, esta tecnología se está desarrollando e integrará "cuando estemos convencidos de que funciona correctamente".
Bertsos
El reto es dotar a los investigadores de capacidad de escucha. En definitiva, "el audio es una onda sonora con ondas y huecos de frecuencia determinada. Pues bien, recogiendo estas frecuencias, el robot debe derivar letras y de ahí, la palabra, y al identificar una sucesión de palabras, debe resolver su significado". Elena Lazkano, miembro del Grupo de Investigación en Robótica y Sistemas Autónomos de la UPV/EHU, explica este hecho. "Hay herramientas para otras lenguas, pero el euskera tiene muchas particularidades, y en eso estamos trabajando", dice. Su creación más conocida es el bertsolari Tartalo, desarrollado en colaboración con el Grupo IXA de la UPV.
La verdad es que como casi todos los robots mencionados (Eureka! excepto el del museo), el propio robot no ha sido construido por ellos, sino por la inteligencia que tiene detrás; en este caso, ser capaz de hacer bertsos. Así, al igual que Tartalo, pueden poner en bertsos otros robots. Entre otras cosas, han realizado algunas sesiones con el último robot que han entrado en el equipo: Con Nao.
El equipo de la UPV-EHU optó por el bertsolarismo como tema de desarrollo de capacidades para los robots, “porque el bertsolarismo es una afición a la que nos gusta, por un lado, y por otro, porque permite trabajar en diferentes ámbitos de la robótica, como la navegación y la exploración, comprender e interiorizar los temas que se le proponen y generar una respuesta a ello. Todo ello, además, con una expresión corporal adecuada, es decir, expresando que está pensando, actuando como bertsolaris, etc.", explica Basilio Sierra.

Además de trabajar la interacción entre personas y seres humanos, consideran que la puesta en bertsos de los robots es una buena forma de mostrar a la sociedad el trabajo que están realizando. Sin embargo, esta tecnología desarrollada puede ser también de utilidad para otros servicios, como “si es conductor de un museo, para atender a las personas que acuden a hablar, o para llevar a los pacientes a la consulta que quieren acudir a un hospital”, explica Sierra.
Estética, imprescindible
Al tener que relacionarse con las personas, el aspecto de los robots es un tema muy importante, según los investigadores. Lazkano afirma que "los seres humanos tenemos facilidad para comunicarse con los seres humanos, por lo que podemos empezar a hablar con un robot humanoide como Nao más que con un artilugio de hierro como Tartalo. Por tanto, si queremos atraer a la gente al mundo de la robótica, tenemos que ofrecerle algo atractivo".
Aunque la importancia del uso de robots humanoides se está extendiendo últimamente, "en Japón llevan 10 años desarrollando este tipo de robots -dice Urko Esnaolak--. En Europa nos hemos centrado más en los robots industriales". Precisamente por ello, Esnaola está realizando una estancia en el laboratorio JSK de la Universidad de Tokyo para seguir desarrollando el robot Hiro. El mismo Hiro es humanoide desde la cintura hacia arriba, ya que aunque está diseñado para ayudar en la industria, el objetivo es colaborar con las personas.
¡Eureka! el robot para el museo de la ciencia no ha sido visto como humano, pero "hemos cuidado mucho la estética", explica Susperregi. Lazkano sugiere que se asemeja al robot Eva de Wall-e, al revés. En el transcurso de la prueba se realizaron varias sesiones para ver la reacción de la gente ante esta situación y Susperregi recuerda que una vez se le acercó un joven y le preguntó si quería ser su amigo. "Al fin y al cabo, la gente responde ante los robots y, ante la apariencia, espera tener un comportamiento determinado", afirma.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







