



Haptic or tactical exploitation

Without tactile capacity, the movements of the body measured and the interaction with the medium become almost impossible. Furthermore, if the ability to feel heat and pain is lost, many situations that would otherwise not cause damage become dangerous.
Devices that transmit information through touch are called haptic devices and, according to forecasts, XXI. In the twentieth century they can revolutionize the known systems of communication between the human being and the medium.
As for etymology, the origin of the word "haptika" is found in the Greek, where the word haptesthai encompasses everything related to the tactile sense.
If we would like to combine the meaning of Haptika in a single sentence, we would say: Haptika is a science that studies the research, development and use of touch communication systems between the human being and the medium.
Components of haptic systems
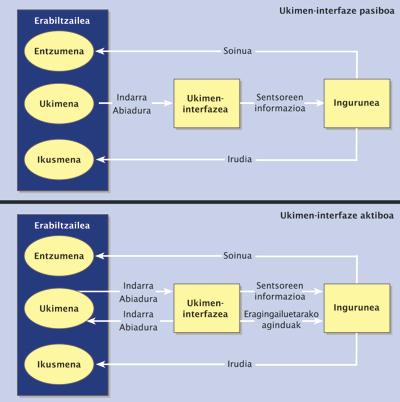
In haptic systems we can distinguish three fundamental components: user, interface or haptic and medium device.

1. The user is an important part of the haptic system as it decisively influences the behavior and stability of the system. The user is the intrinsic part of the control loop: on the one hand, his actions directly affect the activity of the system and, on the other, according to this activity, the haptic system feeds the touch sensations.
2. The haptic interface is a mechanical device that serves as a link between the user and the medium. The sensors located there inform the system of the movements of the device while the actuators act on the user by touch, transmitting haptic information.
3. As for the environment, in general, haptic systems work with virtual environments. These environments are presented by graphical interfaces, that is, screens, video projectors or stereoscopic helmets. The image that the user will see is built using software and the virtual tool he uses. Likewise, depending on the virtual movements and interactions of this tool, the forces to feedback the user are calculated.
However, more and more haptic systems are operating with real means. In these cases, the tool used by the user is real and can be handled by the user or remote. The user feedback forces depend on parameters measured in the instrument itself or in the environment.
Main features of the haptic devices
Most of the touch interfaces available today do nothing more than read user movements and the user receives audiovisual information from the environment.

Making a reading of user movements is a highly studied field, but it is not a baladí thing to transmit information to the user through touch. To meet this challenge, knowledge of areas such as robotics, computer science, system control, physiology or psychology is necessary.
Taking advantage of these areas of knowledge, haptic devices must have a main feature to ensure their proper functioning: transparency. A haptic device must meet two conditions to be considered structurally transparent:
- The user should only feel retro-powered theoretical forces, that is, the mechanical characteristics of the device cannot cause changes in the retro-fed forces.
- Retronourished sensations or touch forces must faithfully reflect reality.
In order to meet these two requirements, a good knowledge of mechanical design techniques is necessary. If, by chance, transparency in the performance of the haptic device is not guaranteed, the interaction between the user and the medium can be distorted.
The inertia, the friction, the rigidity, the slack, the isotropy, the type of drive, the degree of force of the same, the precision of the sensors, the balance of the forces of gravity, the safety, the ergonomics and the cost are many the characteristics to take into account in the design of the haptic devices. Apart from the last three, all others have a direct impact on transparency.
It is necessary to achieve a balance between all these characteristics, since the improvement of a characteristic can mean a worsening of another. For example, to achieve high stiffness, the inertia of the mobile elements of the device can be increased. The means to avoid it are the use of high rigidity and low density materials and design optimization, ensuring a reasonable cost of them.
Haptic system
uses for the use of
The creation of haptic systems is due to research for medicine and the military field. In the last decade, however, haptic systems have not only made great advances in research, but also in the business field, extending its use dramatically. The main fields of application of haptic systems today are:
Remote control remote control remote control
Sometimes it is necessary to introduce robots in strange or dangerous environments and users remotely direct them to avoid dangerous situations. In these circumstances, it is useful that the user receives a tactile feedback of the robot's works or actions, in addition to audiovisual information. Clear examples of the situations described are nuclear power plants, autonomous submarine and space vehicles, as well as robots for detection and deactivation of explosives.

In other uses it may be interesting to reflect user movements on a larger scale. Haptic interfaces allow the user to direct in their environment, with great ease, work areas of different sizes through a fixed and limited work area.
Training exercises for training
The goal of these systems is to train users in virtual environments so they can perform similar exercises in the real world in an orderly manner. The environment is created by computer and the haptic interface is designed according to the type of exercise. By retropowering through haptic interfaces the forces that the user would feel in reality, a high degree of realism can be achieved and, at the same time, user errors have no fatal consequences in reality.
Examples of these systems are medical training systems or vehicle simulators for military and civilian purposes.
Computer-aided design
The haptic devices allow to analyze models designed by computer without the need of models. This allows you to save time and expenses, correct errors and previously perform a simulation of assembly and maintenance. These exercises can avoid many problems and design changes that can appear later.

Leisure and leisure activities
The powerful leisure industry has become in recent years one of the most important fields of application of haptic systems. So far, video games and virtual reality systems have used audiovisual communication as a response to user actions. On this path, however, it is difficult to take great steps and if you want to involve the user even more in games it is necessary to address the possibilities offered by touch.
In the face of the future, important advances are expected from the hand of the main suppliers of video games. At present, the new haptic devices are in development, with a degree of increasing realism of the sensations they generate and affordable prices in the short term.
Self-driving self-driving
Haptic devices have also reached the automotive industry. The cars offer more and more additional elements (radio, handsfree phone, air conditioning, browser, suspension adaptation, etc. ), and drivers are immersed in different screens and menus each time to correct them. For this reason, motorists have begun to use haptic devices to facilitate the work of the driver and prevent less attention being paid on the road.
On the other hand, the main manufacturers are working on the design of haptic pedals. A pedal of this type would feed the forces to the driver as prescribed by the speed control system or assisted brake.

Looking to the future
It is difficult to predict what will be the future trajectory of haptic systems and the speed of development of this technology. In fact, who could foresee the XX. Flat digital televisions of 100 inches in the middle of the century?
Standardization of haptic devices, cost reduction, and configuration capacity as desired are the main short-term goals. The achievement of these characteristics would facilitate the propagation of haptic devices, however, would be a pending task, especially in the degree of realism of the retro-nourished sensations.
However, taking into account the wide range of uses of the haptic systems and the remarkable virtues, it would not be an absurd affirmation to affirm that the human beings and the machines and interfaces that surround us are in the antechamber of a revolution.
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







