
Recherche du robot "idéal"
2010/08/08 Aulestiarte Lete, Izaro - Elhuyar Zientziaren Komunikazioa

Un groupe de chercheurs de l'Université d'Oregon a récemment fait connaître le travail qu'il développe entre les mains. Avant la fin de l’été, il veut présenter le robot « innovant ». Vous serez en mesure de marcher et de courir facilement. Cependant, l'une des priorités du groupe est de réduire la quantité d'énergie utilisée par d'autres robots similaires.
En outre, l'équipe estime que le projet pourrait aider à créer à l'avenir des robots pour des missions complexes, « même pour créer des prothèses qui pourraient être mieux contrôlées ou pour que certaines personnes qui se déplacent en fauteuil roulant puissent avoir une certaine capacité de marcher ».
En général, les robots sont conçus pour des travaux mécaniques. Elles sont utilisées dans des situations concrètes et contrôlées, la plupart d'entre elles pour la réalisation d'actions ou d'activités répétées encore et encore. Entre autres choses, nous les relions facilement aux domaines de l'exploration spatiale, de l'automobile ou de l'industrie productive. «Mais quant à la locomotion, les êtres humains et autres animaux sont difficiles à imiter», a affirmé l’un de ses membres.

BigDog est un robot capable de traiter presque tous les troubles. Cependant, il consomme beaucoup d'énergie. (Photo: Boston Dynamics ) .
« Pendant longtemps, les experts se sont basés principalement sur l’expérience et l’intuition pour travailler sur la locomotion des robots. Cependant, nous avons voulu faire un pas en arrière pour analyser la dynamique de base du système mécanique et déterminer le comportement réel d'un système robotique donné. Autrement dit, une pierre ne peut pas voler, quel que soit le logiciel qui se prépare pour elle », a-t-il ajouté. De ce point de vue, la clé serait de déterminer avec l’efficacité nécessaire quels éléments fonctionneront et lesquels ne fonctionneront pas, “même avant leur fabrication”.
Combinaison de modèles
Avec une petite quantité d'énergie, les humains peuvent facilement se déplacer sur des terrains abrupts. Entre autres choses, nous obtenons l'équilibre à travers les muscles et les tendons. Et nous avons différentes façons de bien mesurer et utiliser les forces: nous pouvons garder un objet dans un endroit fixe et sur une route pleine de trous, en allant en voiture, nous pouvons également éviter que le contenu de la tasse de café ne se déverse.

Les robots ne peuvent pas encore bouger aussi élégamment que les humains. (Photo: Boris Furlan).
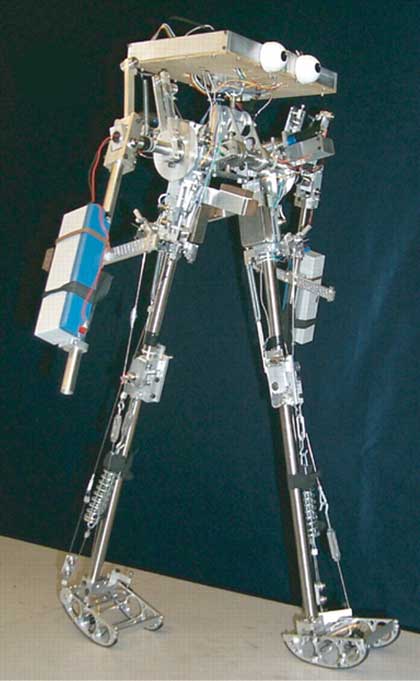
Cependant, la plupart des robots mobiles ou des runners doivent être aussi rigides que possible jusqu'à obtenir une forme de base de marche, ils ne peuvent pas se déplacer aussi élégamment que les humains. De plus, le processus nécessite beaucoup d'énergie et ses valeurs et applications possibles sont réduites.
L'équipe américaine a expliqué qu'elle veut unir deux modèles de robots disponibles sur le marché. « Dans les plaines, il y a des robots qui peuvent bien fonctionner sans contrôle actif, qui ont peu d’énergie, mais qui se déchaînent mal face aux perturbations », explique-t-il. Pour simuler la marche humaine, une technique appelée dynamique passive est utilisée. Cela permet de profiter de l'inertie et de la gravité d'une étape pour l'utiliser à l'étape suivante, empêchant le robot d'avoir besoin de plus d'énergie que les humains.
“Eh bien, nous voulons combiner ces robots avec dynamique passive avec les robots qui se trouvent à l'autre extrémité, comme c'est le cas avec BigDog, qui, en dépit de consommer beaucoup d'énergie, sont capables de faire face à presque toutes les perturbations”, a-t-il affirmé. « En bref, la clé est de profiter des contrôles actifs ou moteurs uniquement aux moments nécessaires. Le logiciel prendra le contrôle de l'apparition d'une altération, la dynamique passive étant la protagoniste tout le reste du processus ».
Publié dans 7K

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia