
Buscant el robot "ideal"
2010/08/08 Aulestiarte Lete, Izaro - Elhuyar Zientziaren Komunikazioa

Un grup d'investigadors de la Universitat d'Oregon ha donat a conèixer recentment el treball que desenvolupa entre les mans. Abans de finalitzar l'estiu vol presentar el robot “innovador”. Serà capaç de caminar i córrer amb facilitat. No obstant això, una de les prioritats del grup és reduir la quantitat d'energia que utilitzen altres robots similars.
A més, l'equip considera que el projecte podria ajudar a crear en el futur robots per a missions complexes, “fins i tot per a crear pròtesis que podrien ser més ben controlades o perquè algunes persones que es desplacen en cadira de rodes puguin tenir certa capacitat de caminar”.
En general, els robots estan dissenyats per a treballs mecànics. S'empren en situacions concretes i controlades, la majoria d'elles per a la realització d'accions o activitats que es repeteixen una vegada i una altra. Entre altres coses, les relacionem fàcilment amb les àrees de l'exploració espacial, l'automoció o la indústria productiva. “Però quant a la locomoció, els éssers humans i altres animals són difícils d'emular”, ha afirmat un dels seus membres.

BigDog és un robot capaç de fer front a gairebé qualsevol trastorn. No obstant això, consumeix molta energia. (Foto: Boston Dynamics ) .
“Durant molt de temps, els experts s'han basat principalment en l'experiència i la intuïció per a treballar en la locomoció dels robots. Nosaltres, no obstant això, hem volgut fer un pas enrere per a analitzar la dinàmica bàsica del sistema mecànic i determinar quin pot ser el comportament real per a un determinat sistema robòtic. És a dir, una pedra no pot volar, independentment del programari que es prepari per a ella”, ha afegit. Des d'aquest punt de vista, la clau seria determinar amb la necessària eficàcia quins elements funcionaran i quins no, “fins i tot abans de la seva fabricació”.
Combinant models
Amb una petita quantitat d'energia, els éssers humans podem moure'ns fàcilment per terrenys abruptes. Entre altres coses, aconseguim l'equilibri a través dels músculs i tendons. I tenim diferents maneres de mesurar i utilitzar bé les forces: podem mantenir un objecte en un lloc fix i en una carretera plena de forats, anant amb cotxe, també podem evitar que es vessi el contingut de la tassa de cafè.

Els robots encara no poden moure's tan elegantment com els humans. (Foto: Boris Furlan).
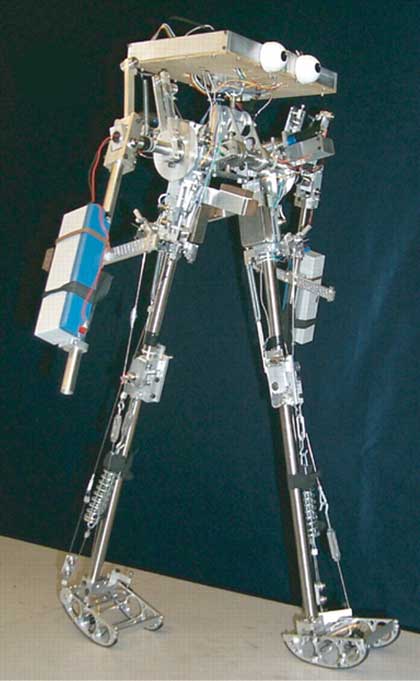
No obstant això, la majoria dels robots mòbils o runners han d'estar el més rígids possible fins a aconseguir una forma bàsica de caminar, no poden moure's tan elegantment com els humans. A més, el procés requereix molta energia i es redueixen els seus possibles valors i aplicacions.
L'equip estatunidenc ha explicat que vol conjuminar dos models de robots disponibles en el mercat. “En les planes hi ha robots que poden funcionar bé sense control actiu, necessiten poca energia, però es desencadenen malament davant les alteracions”, explica. Per a simular la marxa humana s'utilitza una tècnica anomenada dinàmica passiva. Això permet aprofitar la inèrcia i la gravetat d'un pas per a utilitzar-la en el següent pas, evitant que el robot necessiti més energia que els humans.
“Doncs bé, nosaltres volem combinar aquests robots amb dinàmica passiva amb els robots que es troben en l'altre extrem, com és el cas de BigDog, que, malgrat consumir molta energia, són capaces de fer front a gairebé qualsevol pertorbació”, ha afirmat. “En definitiva, la clau està a aprofitar els controls actius o motors només en els moments necessaris. El programari assumirà el control davant l'aparició d'una alteració, sent la dinàmica passiva la protagonista durant tota la resta del procés”.
Publicat en 7K

Gai honi buruzko eduki gehiago
Elhuyarrek garatutako teknologia